Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Neural Nets
Over the past decade, the paradigm of deep learning has been successful not only in machine learning, but also in the broader scientific community. Substantial effort has gone into the development of deep neural networks, and we have contributed several notable advancements.
Generative modeling In [![]()
![]() ], we improve over variational autoencoders by designing more refined regularization mechanisms, thereby making significant progress towards addressing some of the problems constraining VAEs, e.g., poor sample quality and instable training. Besides VAEs, we have also contributed to the field of generative adversarial networks (GANs). In [
], we improve over variational autoencoders by designing more refined regularization mechanisms, thereby making significant progress towards addressing some of the problems constraining VAEs, e.g., poor sample quality and instable training. Besides VAEs, we have also contributed to the field of generative adversarial networks (GANs). In [![]() ], we propose and study a boosting style meta-algorithm which builds upon various modern generative models (including GANs) to improve their quality. Further, in [
], we propose and study a boosting style meta-algorithm which builds upon various modern generative models (including GANs) to improve their quality. Further, in [![]() ], we devise a way to constrain and control the kind of samples produced by a GAN generator. Beyond generative modelling, we have contributed to developing a better understanding of how neural networks work, for instance by exploring similarities and differences between deep neural networks and the human visual system [
], we devise a way to constrain and control the kind of samples produced by a GAN generator. Beyond generative modelling, we have contributed to developing a better understanding of how neural networks work, for instance by exploring similarities and differences between deep neural networks and the human visual system [![]()
![]() ].
].
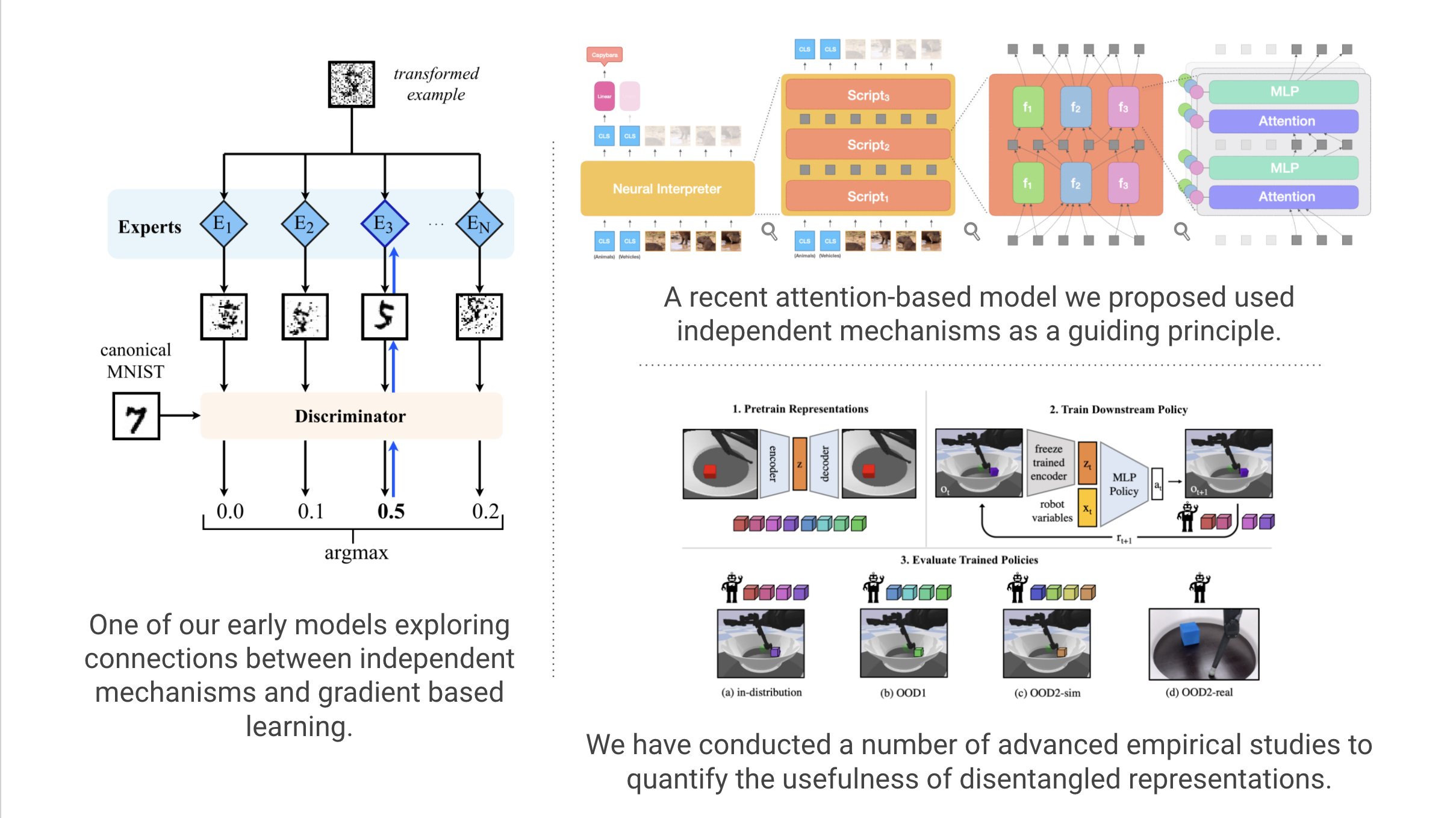
Causal Learning Our research has also pioneered synergies between causality and deep learning. Foundational to these advancements is the principle of independent causal mechanisms (ICM). These mechanisms may interact in interesting and non-trivial ways, but their inner workings are otherwise independent of each other. In [![]() ], we marry the fundamental notion of ICM with the empirically successful framework of gradient-based learning of neural networks.
], we marry the fundamental notion of ICM with the empirically successful framework of gradient-based learning of neural networks.
In one line of work [![]()
![]()
![]()
![]() ], we show how attention mechanisms may serve as a vehicle for incorporating the principle of independent mechanisms into neural networks in a scalable manner. This has lead to impactful architectures that are robust out-of-distribution and can adapt more sample-efficiently to new data. In another line of work [
], we show how attention mechanisms may serve as a vehicle for incorporating the principle of independent mechanisms into neural networks in a scalable manner. This has lead to impactful architectures that are robust out-of-distribution and can adapt more sample-efficiently to new data. In another line of work [![]()
![]()
![]() ] we probe disentangled representations using large scale empirical studies that shed light onto the components required to make them work in practice.
] we probe disentangled representations using large scale empirical studies that shed light onto the components required to make them work in practice.
Finally, we have hosted various challenges and curated datasets [![]()
![]() ] valuable to the deep learning community, and we have pioneered deep learning methods for hard real-world problems such as gravitational wave parameter inference [
] valuable to the deep learning community, and we have pioneered deep learning methods for hard real-world problems such as gravitational wave parameter inference [![]() ].
].
Members

Publications