The department aims to understand the underlying principles of physical intelligence of single and collectives of biological organisms at milli- and micrometer length scales, and realize advanced physical intelligence capabilities on small-scale mobile robots using such principles. As the societal and translational research mission, the team aims to apply these tiny robots as minimally invasive and implantable wireless medical robots inside our body to revolutionize medicine and healthcare. The highly interdisciplinary team has expertise in robotics, micro/nanotechnology, materials science, engineering, physics, biology, chemistry, and medicine. Until 2023, Metin Sitti headed the Physical Intelligence Department. He is now President of Koç University and a Guest Scientists at MPI-IS

Physical Intelligence Highlights





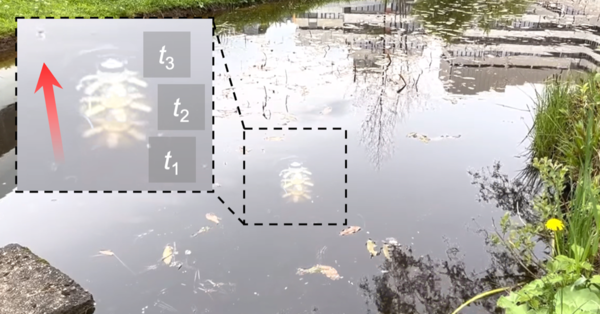
Perturbing dynamics of active emulsions and their collectives
 Matter
Matter
Nuclear magnetic resonance for wireless magnetic tracking
 Nature Communications
Nature Communications

Emergent Motility of Self-Organized Particle-Giant Unilamellar Vesicle Assembly
 Advanced Materials
Advanced Materials
Wireless nonresonant stimulation of neurons on a magnetoelectric film surface
 Science advances
Science advances
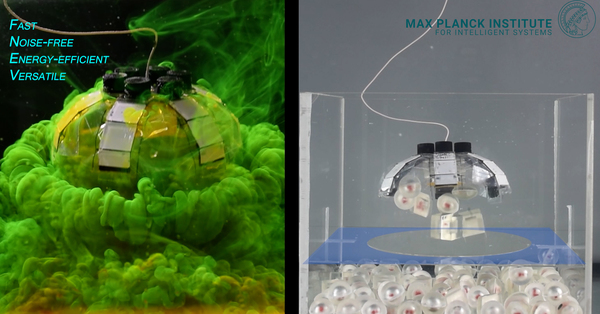
Matryoshka doll-like robot changes its shape in real time and in situ


Bacterial Minicell-Based Biohybrid Sub-micron Swimmers for Targeted Cargo Delivery
 Advanced Science
Advanced Science


 Nature Communications
Nature Communications
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Science AdvancesPerturbing Dynamics of Active Emulsions and Their Collectives
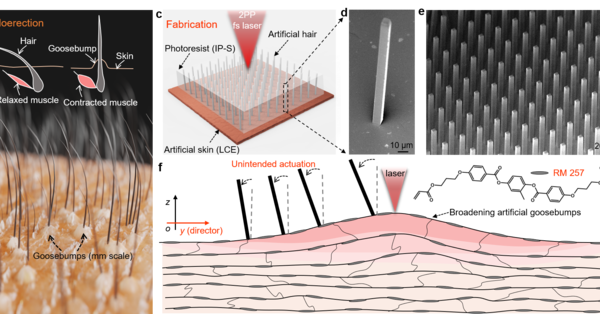
arXiv preprint arXiv:2405.05889Artificial-goosebump-driven microactuation
 Nature Materials
Nature Materials


Hydrogel muscles powering reconfigurable micro-metastructures with wide-spectrum programmability
 Nature Materials
Nature Materials
