Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Dynamic Models and Wearable Tactile Devices for the Fingertips
Humans regularly use their fingertips to physically explore and manipulate their surroundings. For example, healthy adults can distinguish a near infinite range of textures and can quickly compensate when a grasped object slips unexpectedly. The fingertips exhibit this very high tactile sensitivity because they are densely enervated with receptors that detect mechanical stimuli ranging from steady-state deformations up to 1000 Hz vibrations.
Hence, significant scientific effort has been devoted to understanding fingertip deformation mechanics and designing glove-like haptic interfaces, but these efforts have rarely been coordinated or even informed by each other. This project investigates the dynamic characteristics of the human fingertip and simultaneously uses that knowledge to develop a wearable device that can provide high-fidelity vibration feedback.
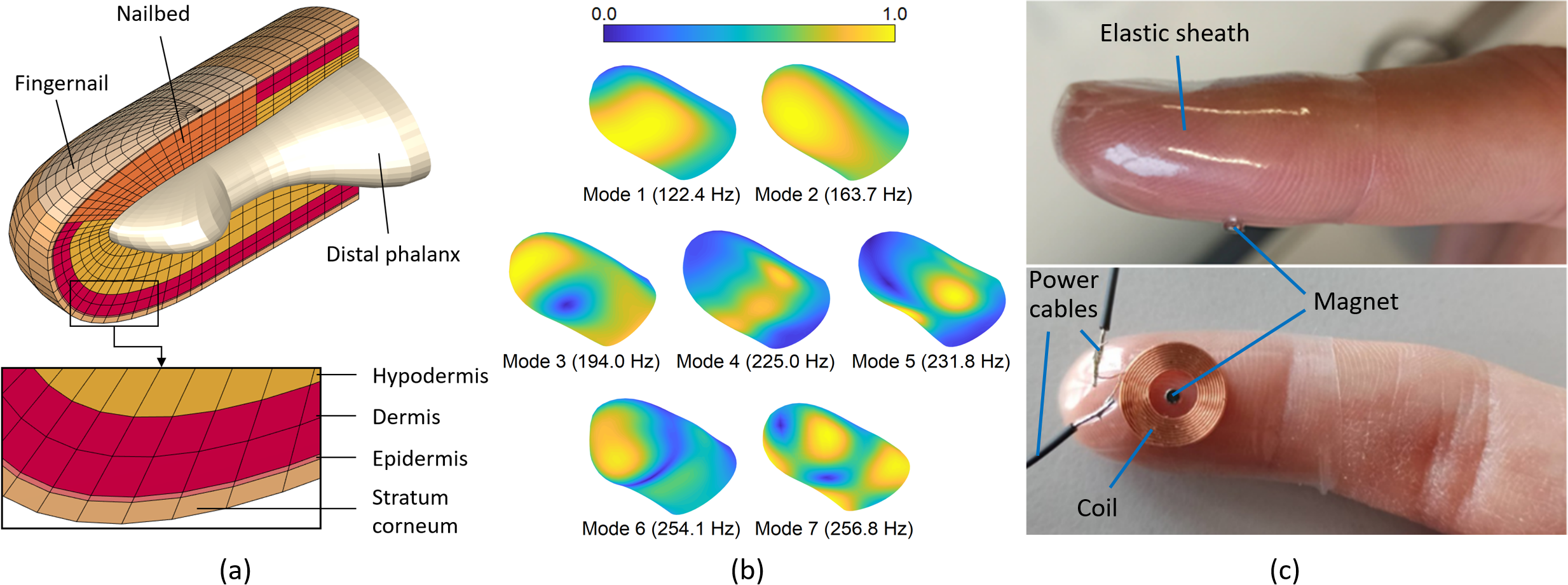
To deeply understand the dynamics of the human fingertip, we used prior anatomy and biomechanics studies to create a detailed three-dimensional finite element model named DigiTip [![]() ]. This model was used to compute the free and forced vibration responses, which illuminate the deformation of the human fingertip in haptic interactions involving oscillating stimuli. Given the amount of prior research conducted on human fingertips, it is surprising that these free vibration modes have never before been reported in the literature.
]. This model was used to compute the free and forced vibration responses, which illuminate the deformation of the human fingertip in haptic interactions involving oscillating stimuli. Given the amount of prior research conducted on human fingertips, it is surprising that these free vibration modes have never before been reported in the literature.
We have recently used this understanding to invent a new type of wearable vibrotactile device [![]() ]: an elastic sheath comfortably holds an embedded permanent magnet on the skin while AC current through a nearby coil generates strong, clear vibrations. Experiments with human participants confirmed that this design achieves exceptional transmission of expressive vibratory signals, as it adeptly stimulates the fourth vibration mode of the human fingertip. We adapted our DigiTip model to match one particular finger and added the soft elastic film and magnet. The excellent agreement between the resulting simulated and experimentally measured vibrations shows the usability of computational models in predicting soft tissue dynamics and characterizing vibratory haptic devices.
]: an elastic sheath comfortably holds an embedded permanent magnet on the skin while AC current through a nearby coil generates strong, clear vibrations. Experiments with human participants confirmed that this design achieves exceptional transmission of expressive vibratory signals, as it adeptly stimulates the fourth vibration mode of the human fingertip. We adapted our DigiTip model to match one particular finger and added the soft elastic film and magnet. The excellent agreement between the resulting simulated and experimentally measured vibrations shows the usability of computational models in predicting soft tissue dynamics and characterizing vibratory haptic devices.
Members



Publications