Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Efficient Large-Area Tactile Sensing for Robot Skin
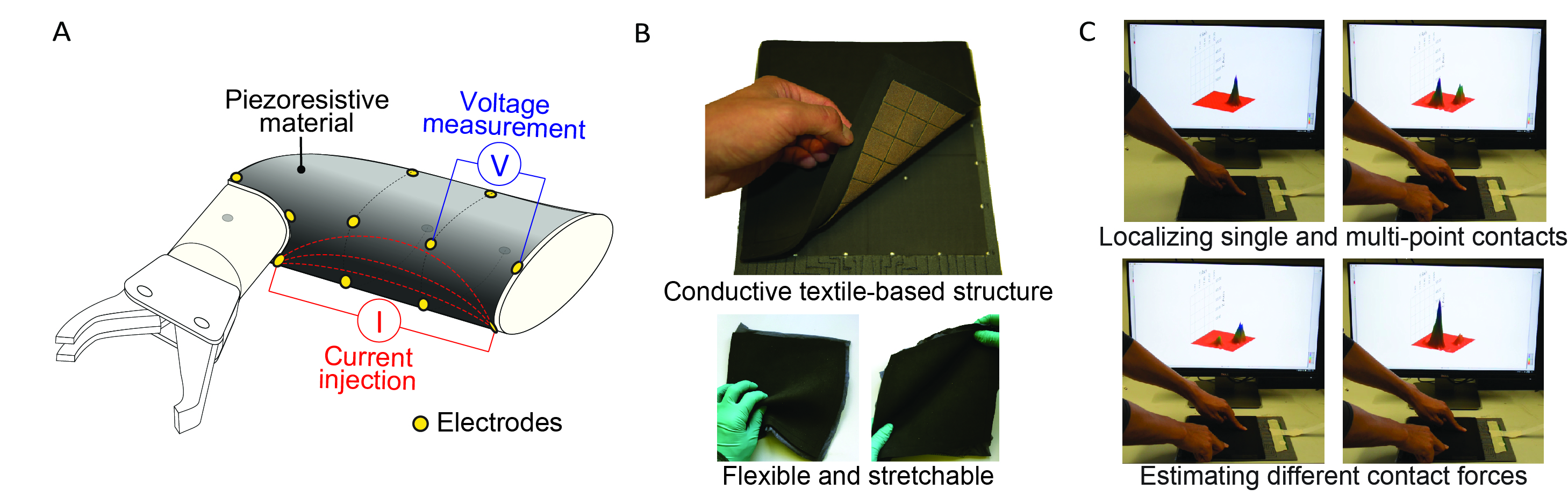
Being able to perceive physical contact is essential for intelligent robots to work well in cluttered everyday environments. Since physical contacts can occur at any location, a successful tactile sensing system should be able to cover all of a robot’s exposed surfaces. Most researchers have pursued the creation of large tactile skin by using many sensing elements that are each responsible for a region; however, deploying many sensing elements is not efficient considering manufacturability, cost-effectiveness, and durability.
This project aims to build a robot skin that combines a sensor design and a computational approach to achieve efficient large-area tactile sensing. The key principle is using a piezoresistive material with a small number of distributed point electrodes; current is injected between successive pairs of electrodes, and the resulting voltage distribution is measured at other electrodes. We used this approach with conductive textiles to create several flexible and stretchable tactile sensor prototype [![]()
![]()
![]()
![]()
![]() ]. They successfully estimate contact location, contact shape, and normal force magnitude over a broad region.
]. They successfully estimate contact location, contact shape, and normal force magnitude over a broad region.
This project opened up two subprojects to enhance large-area tactile sensing performance. The first subproject was optimizing the current injection and voltage measurement by considering the temporal locality of contacts across a large area [![]() ]. This subproject achieved a tactile sensing framerate over 400 Hz, which is five times faster than the conventional method. The second subproject was enhancing the contact estimation performance using sim-to-real transfer learning [
]. This subproject achieved a tactile sensing framerate over 400 Hz, which is five times faster than the conventional method. The second subproject was enhancing the contact estimation performance using sim-to-real transfer learning [![]() ]. This subproject demonstrated that a multiphysics model of the sensor could substantially improve the contact information estimation performance when combined with deep neural networks. In the future, we plan to apply this tactile sensing approach on a real robot surface to demonstrate a whole-body robot skin.
]. This subproject demonstrated that a multiphysics model of the sensor could substantially improve the contact information estimation performance when combined with deep neural networks. In the future, we plan to apply this tactile sensing approach on a real robot surface to demonstrate a whole-body robot skin.
Members





Publications