Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Haptic Empathetic Robot Animal (HERA)
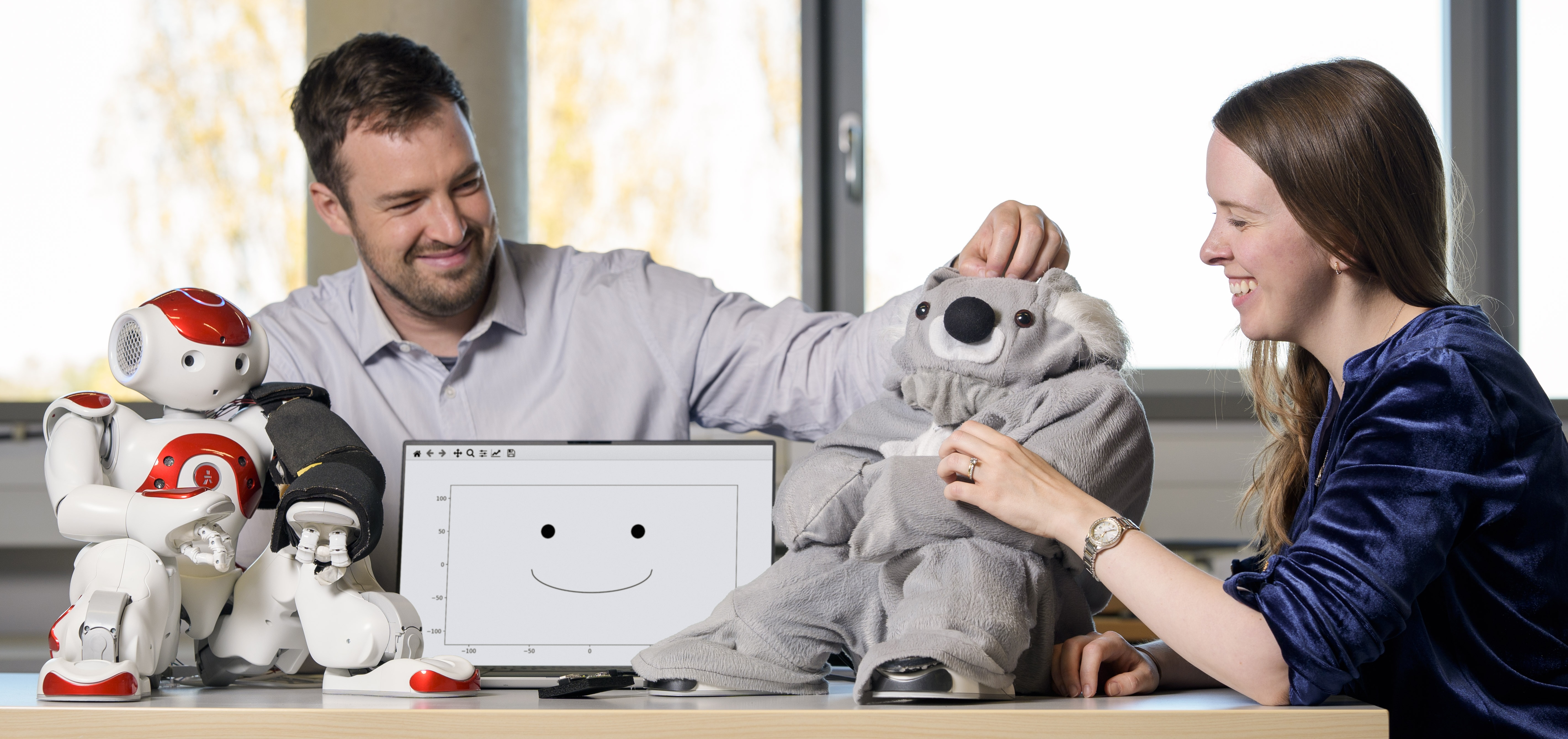
Social touch is a key aspect of our daily interactions with other people. We use social touch to gain attention, communicate needs, and convey emotions. However, children with autism may have difficulties using touch in these ways. While socially assistive robots are generally viewed as promising therapy tool to help children with autism, existing robots typically lack sufficient touch-perception capabilities. We propose that socially assistive robots could better understand user intentions and needs and provide increased support opportunities if they could perceive and intelligently react to touch.
This project entails the design, creation, and testing of a touch-perceptive and emotionally responsive robot, which we refer to as the Haptic Empathetic Robot Animal, or HERA [![]()
![]()
![]()
![]()
![]() ]. HERA is intended to demonstrate new technical capabilities that therapists could use to teach children with autism about safe and appropriate touch. We divided HERA's development into four principal stages: 1) establishing touch-sensing guidelines, 2) building touch-perceiving sensors, 3) creating a long-horizon emotion model that processes and responds to touch interactions, and 4) integrating the subsystems for real-time performance.
]. HERA is intended to demonstrate new technical capabilities that therapists could use to teach children with autism about safe and appropriate touch. We divided HERA's development into four principal stages: 1) establishing touch-sensing guidelines, 2) building touch-perceiving sensors, 3) creating a long-horizon emotion model that processes and responds to touch interactions, and 4) integrating the subsystems for real-time performance.
We established seven key touch-sensing guidelines that a therapy robot should meet through in-depth interviews with eleven autism specialists [![]()
![]() ]. For our initial robot prototype, we enclosed the commercially available humanoid robot NAO inside a koala suit. Based on our guidelines, we then created a tactile perception system composed of fabric-based, resistive tactile sensors [
]. For our initial robot prototype, we enclosed the commercially available humanoid robot NAO inside a koala suit. Based on our guidelines, we then created a tactile perception system composed of fabric-based, resistive tactile sensors [![]()
![]()
![]() ] and a two-stage gesture classification algorithm [
] and a two-stage gesture classification algorithm [![]()
![]() ]. This system can identify five social touch gestures at two intensity levels (ten total gestures + no touch) at each of the sixteen tactile sensors covering the robot's whole body.
]. This system can identify five social touch gestures at two intensity levels (ten total gestures + no touch) at each of the sixteen tactile sensors covering the robot's whole body.
HERA reacts on both short and long-term time scales using an emotion model that is designed to reinforce appropriate social touch behavior and is based on approach-avoidance theory from psychology [![]()
![]() ]. To increase HERA's general applicability as an educational tool, multiple parameters in the emotion model can be modified to customize HERA's personality and behavior. HERA's tactile perception and emotion subsystems run and communicate in real time, enabling live interaction with a robot that feels touch and emotion.
]. To increase HERA's general applicability as an educational tool, multiple parameters in the emotion model can be modified to customize HERA's personality and behavior. HERA's tactile perception and emotion subsystems run and communicate in real time, enabling live interaction with a robot that feels touch and emotion.
Members










Publications