Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
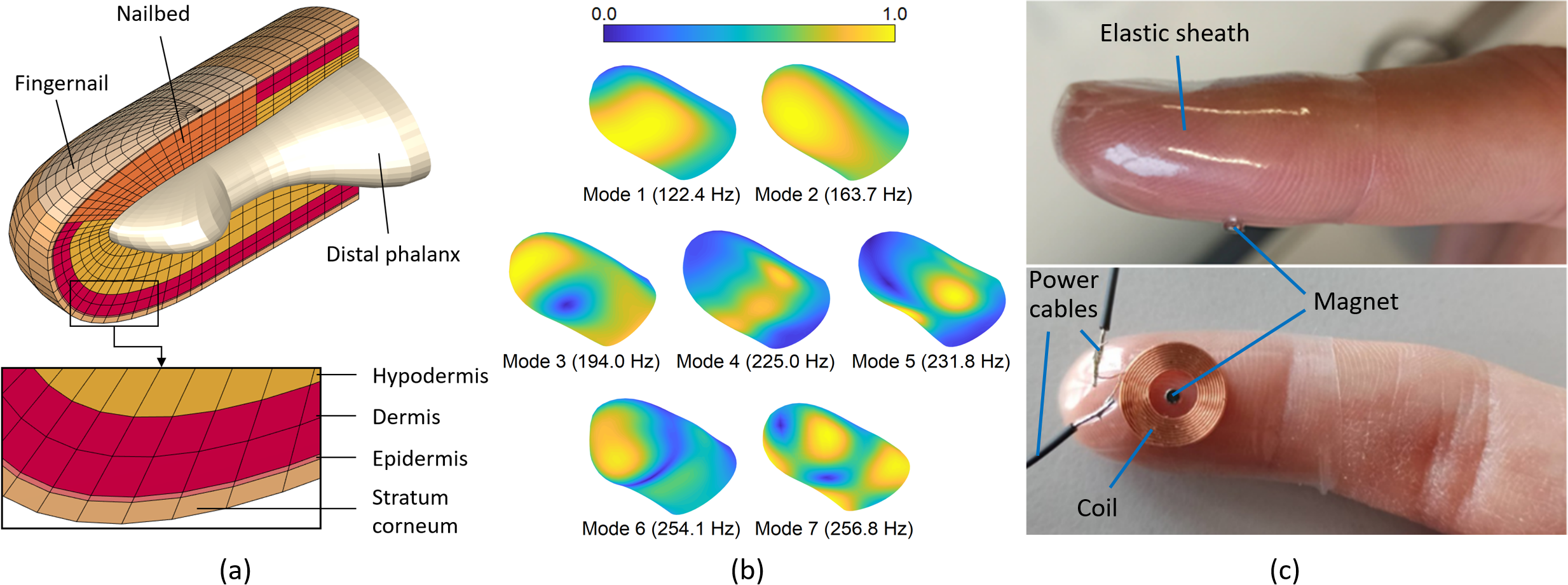
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
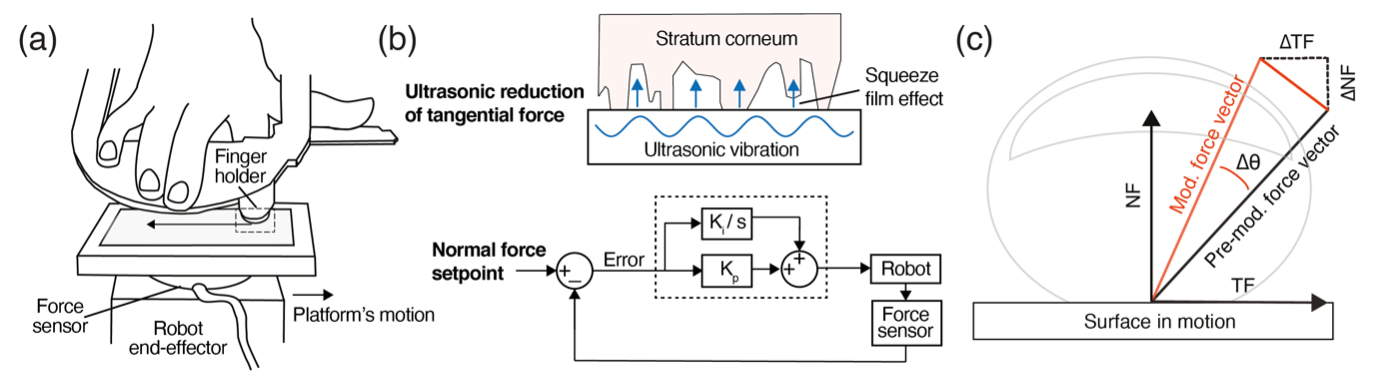
Perception of Ultrasonic Friction Pulses
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
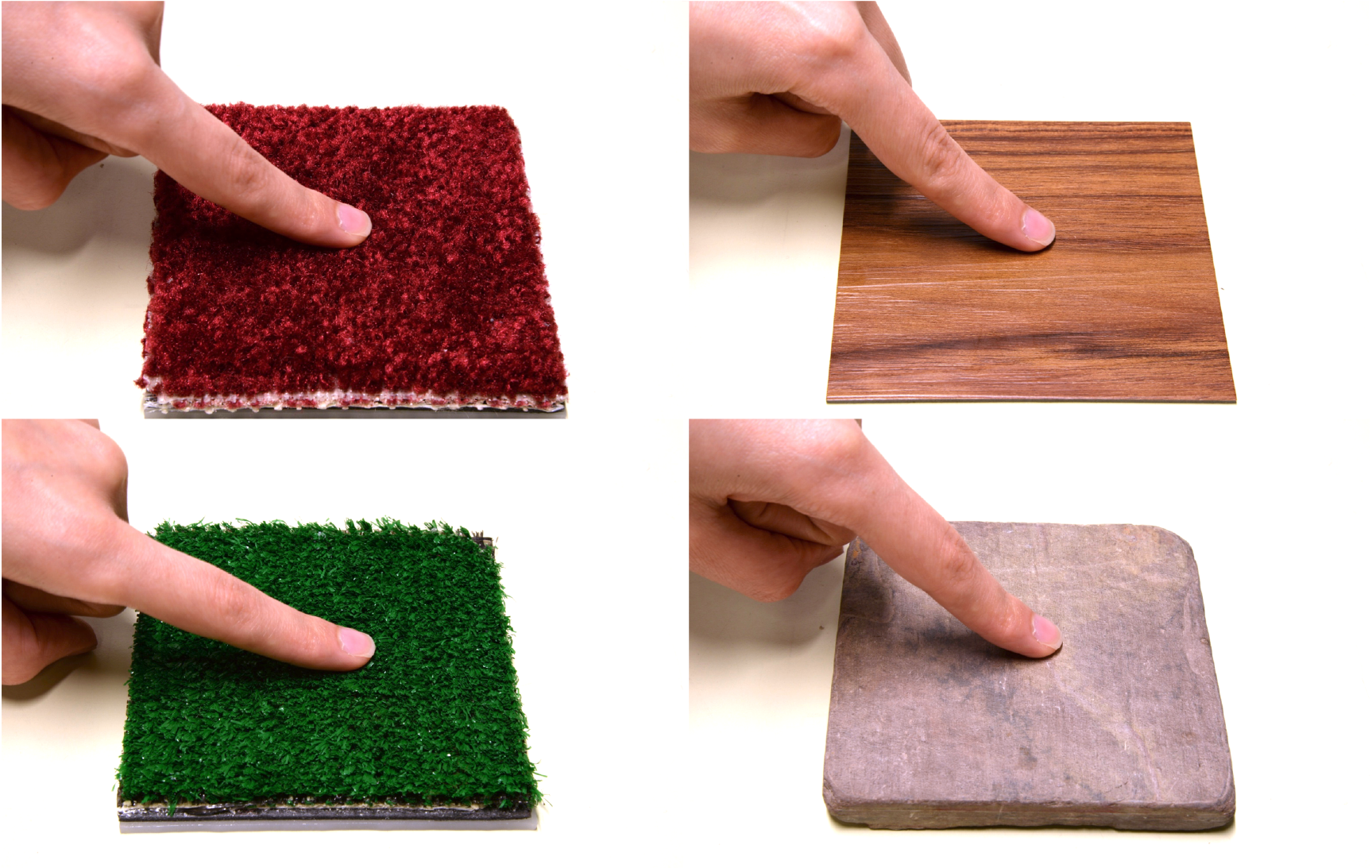
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
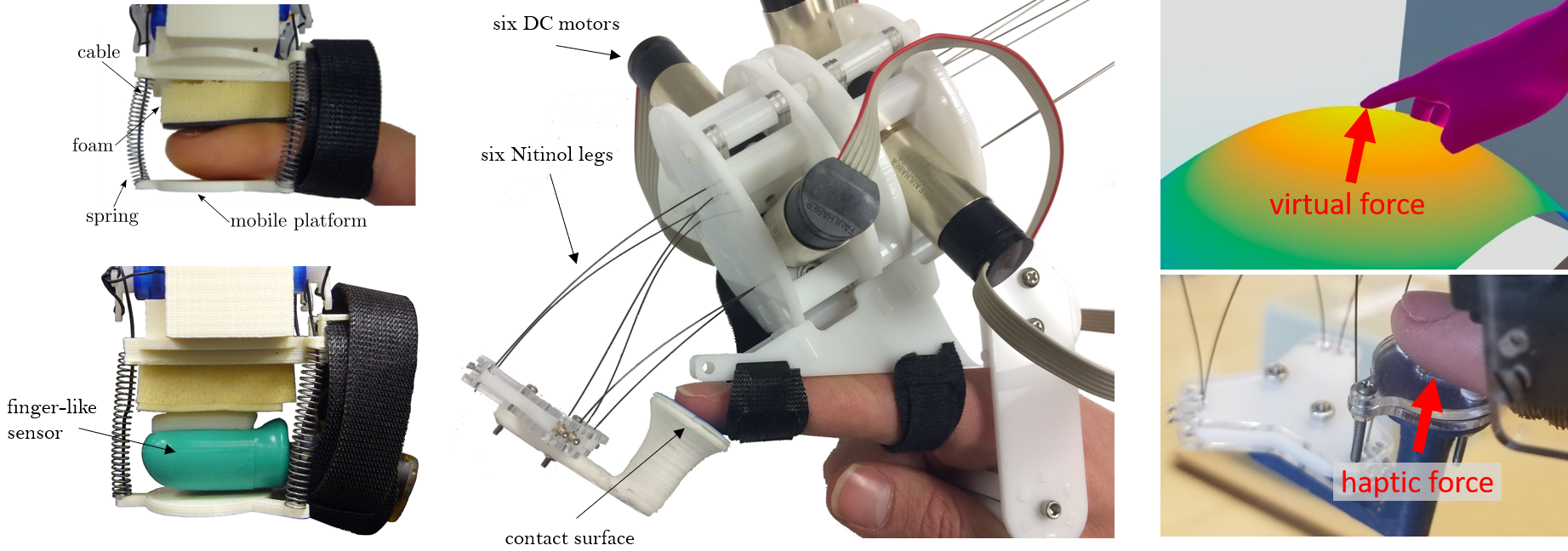
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
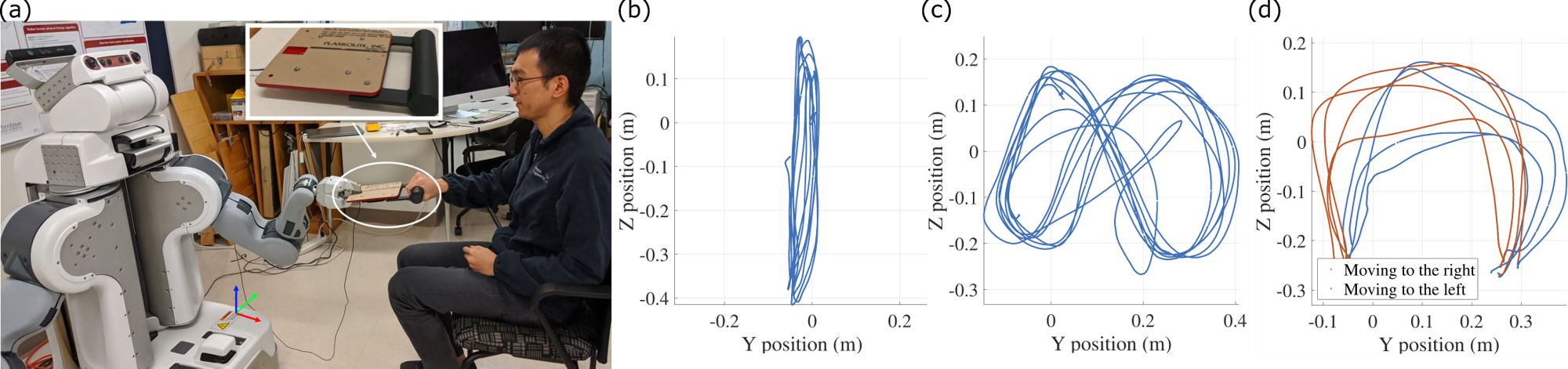
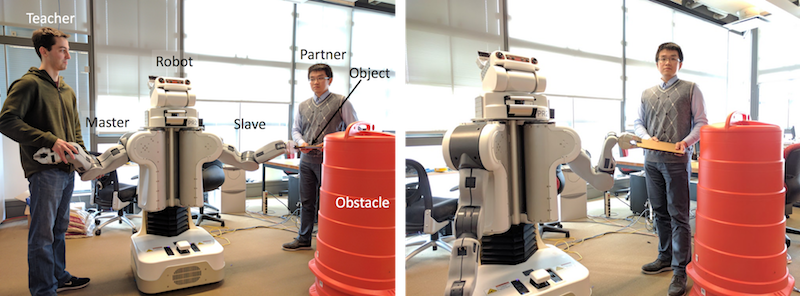
Learning Upper-Limb Exercises from Demonstrations
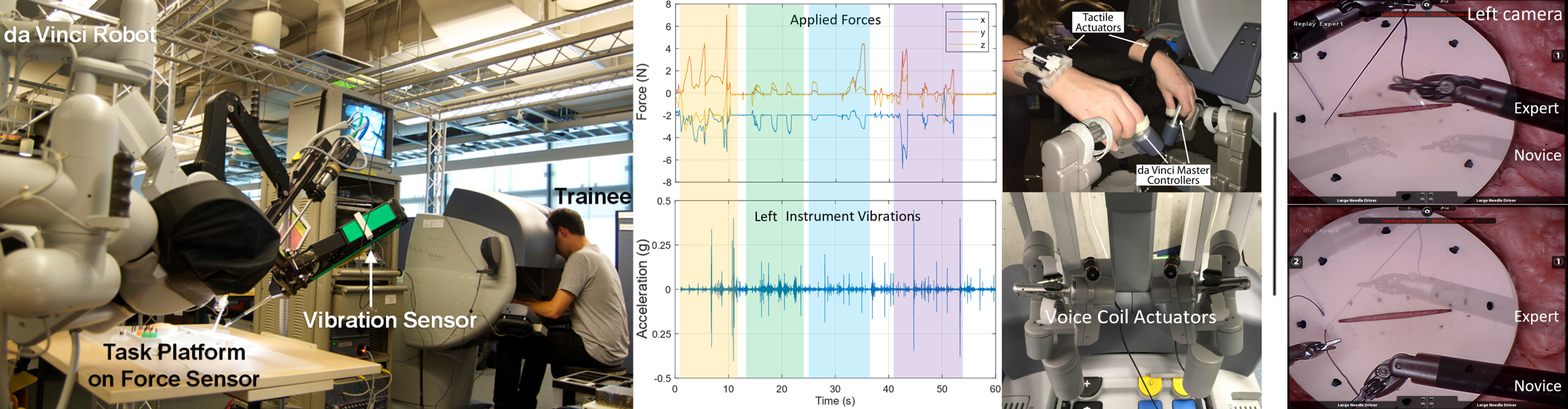
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
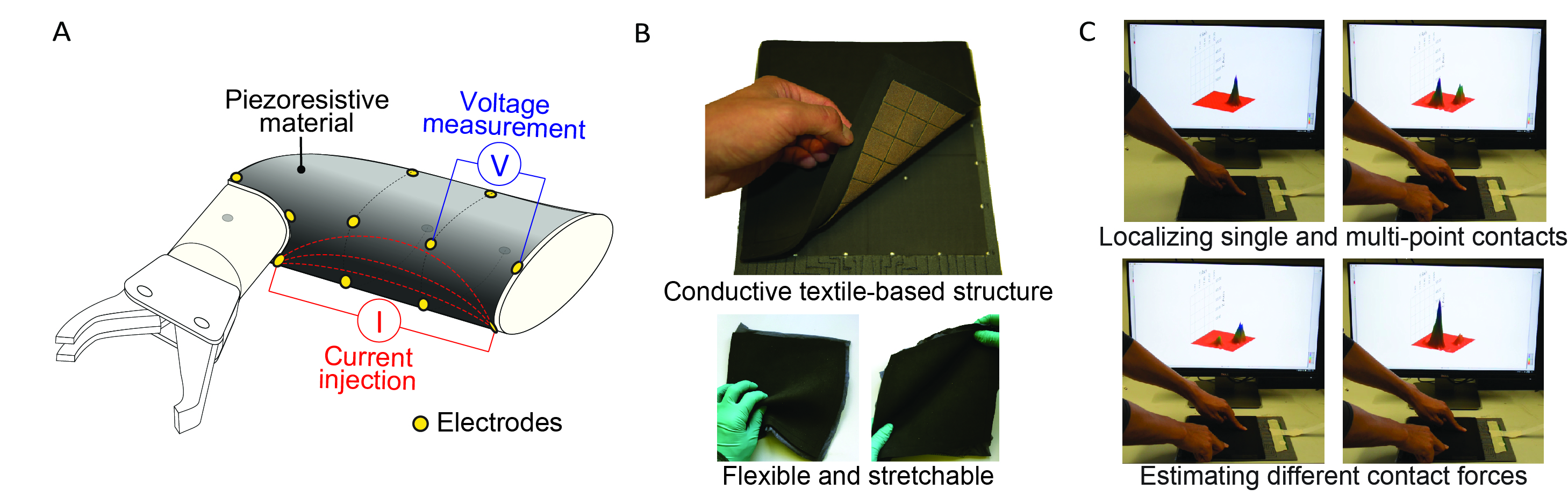
Efficient Large-Area Tactile Sensing for Robot Skin
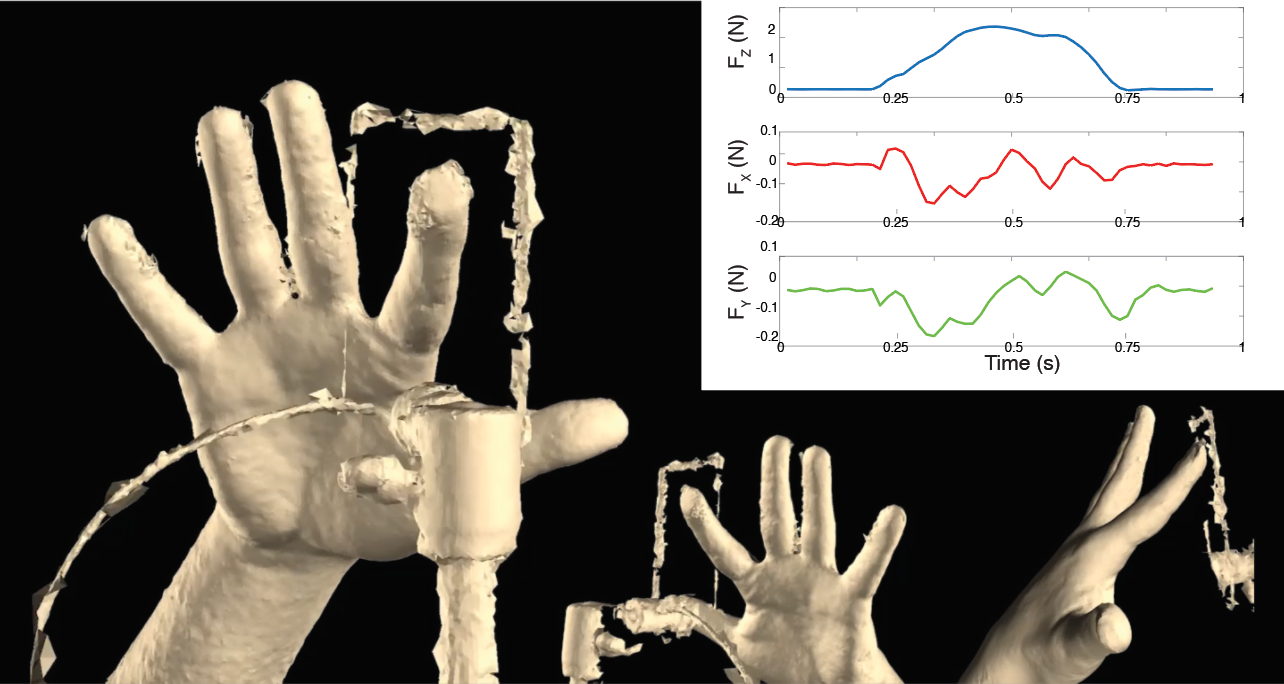
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
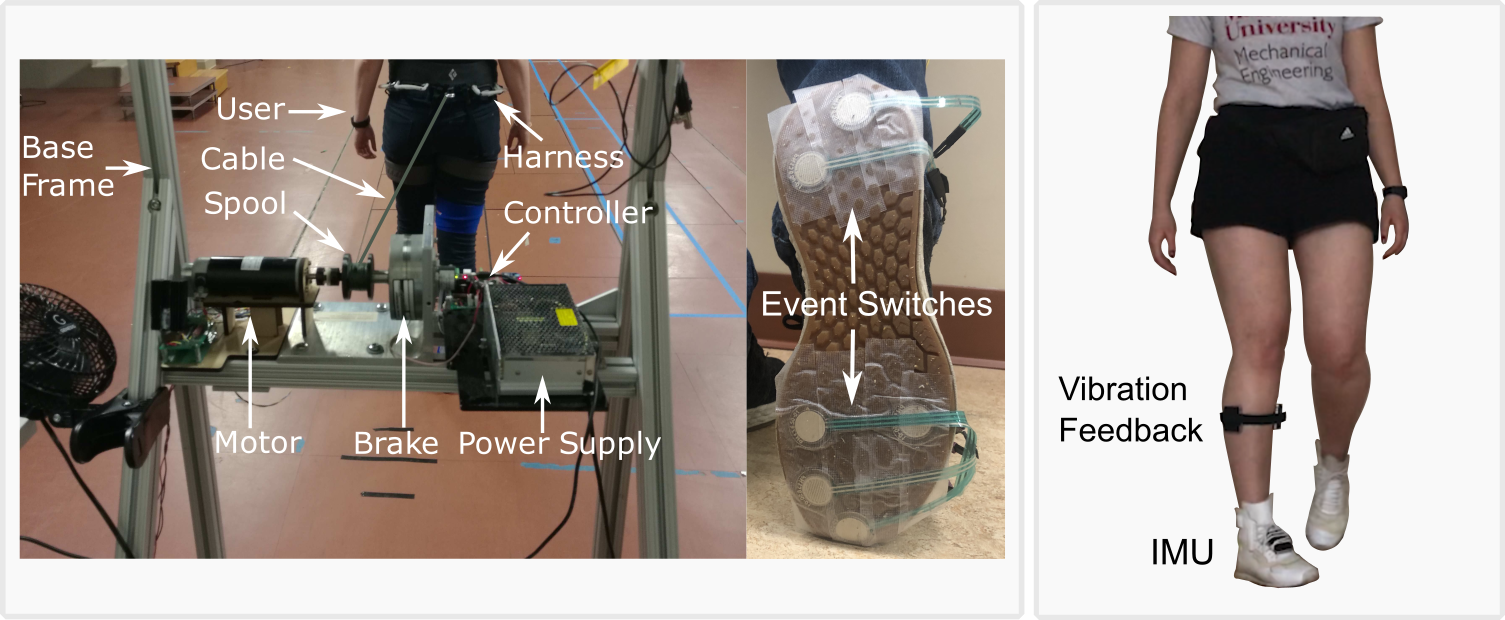
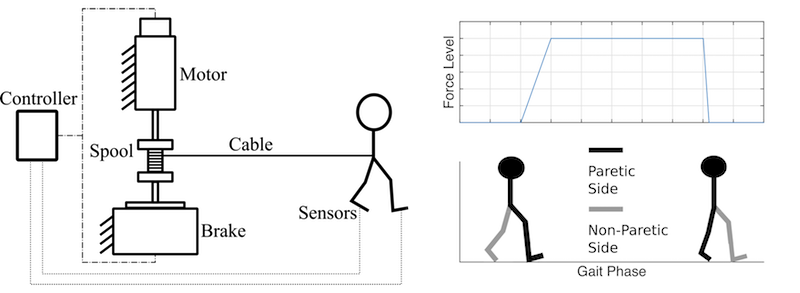
Gait Retraining
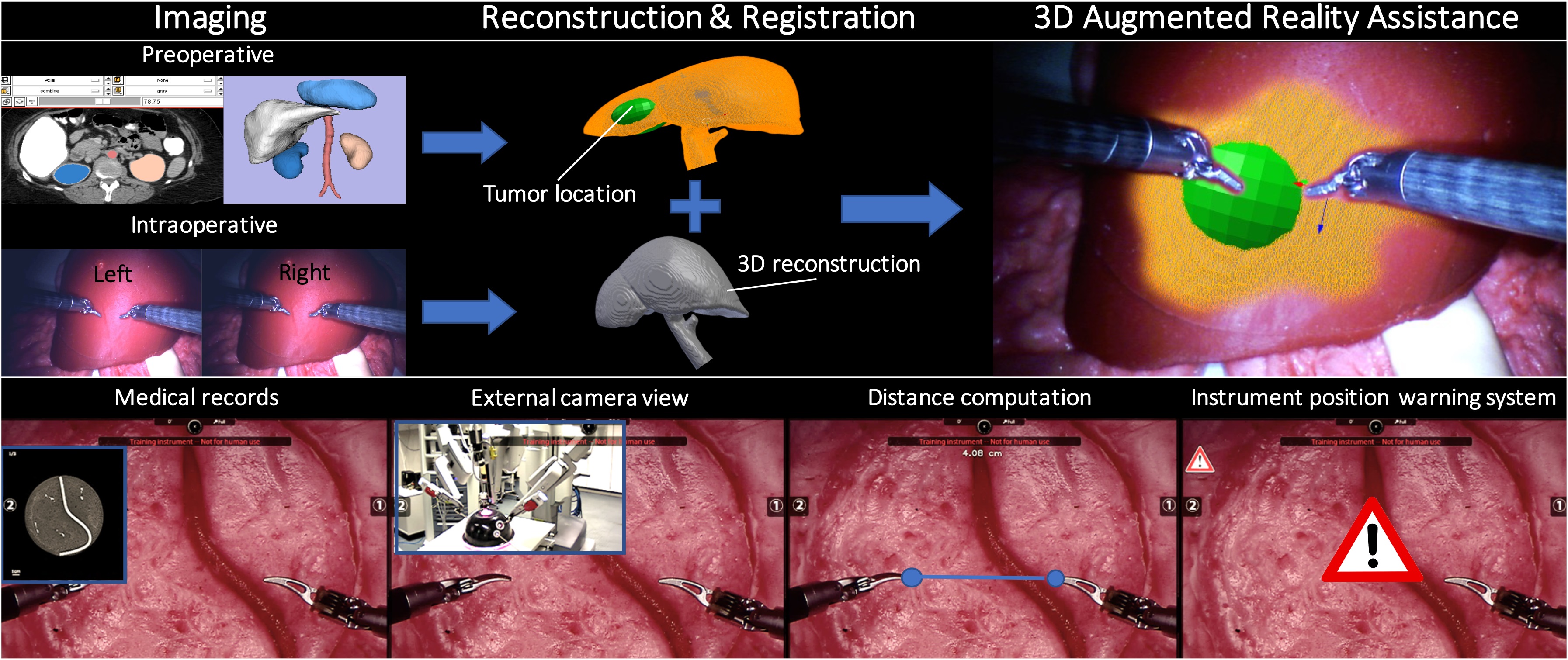
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
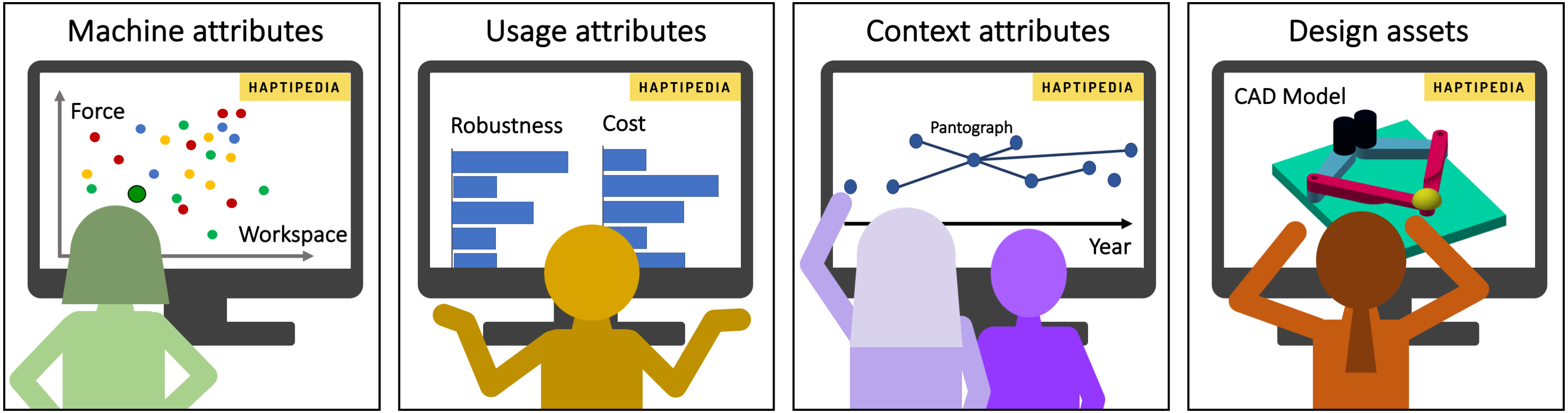
Haptipedia
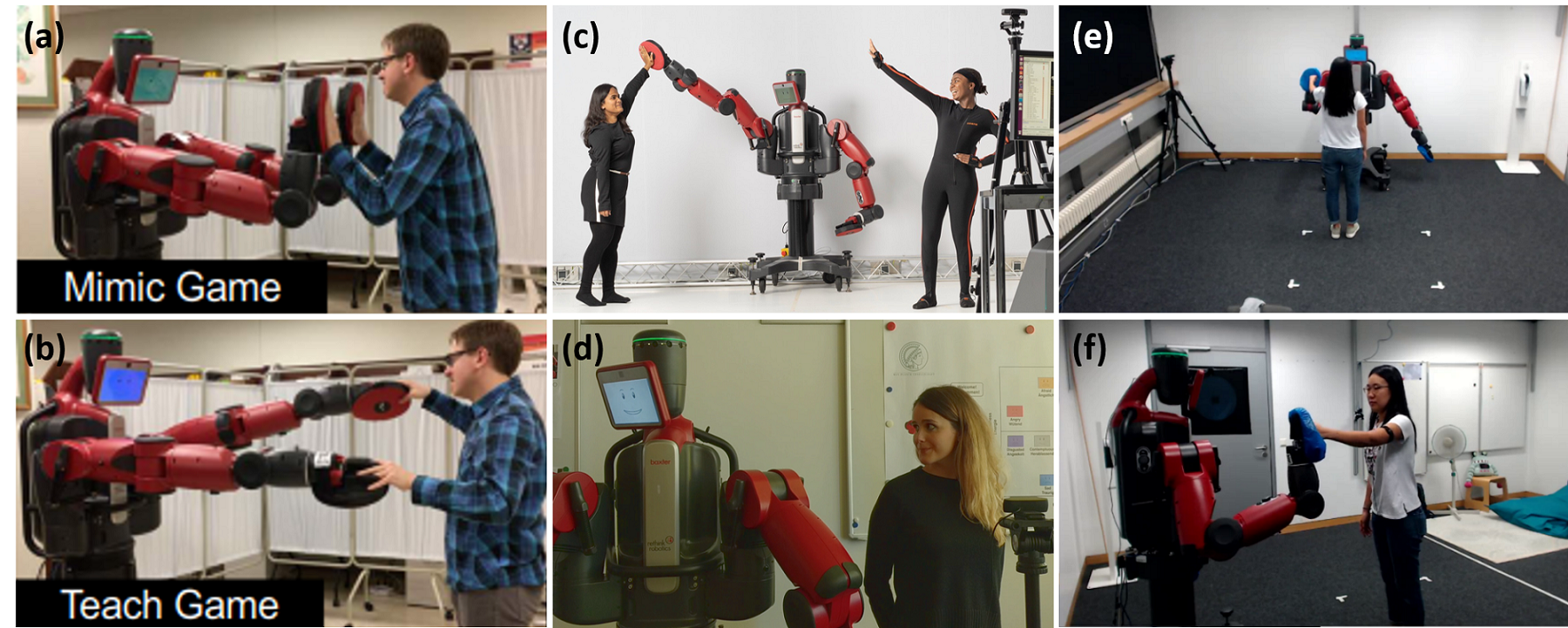
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Previous HI Projects
These projects have been completed and are thus no longer being actively pursued by researchers in the Haptic Intelligence Department of the Max Planck Institute for Intelligent Systems.
Projects
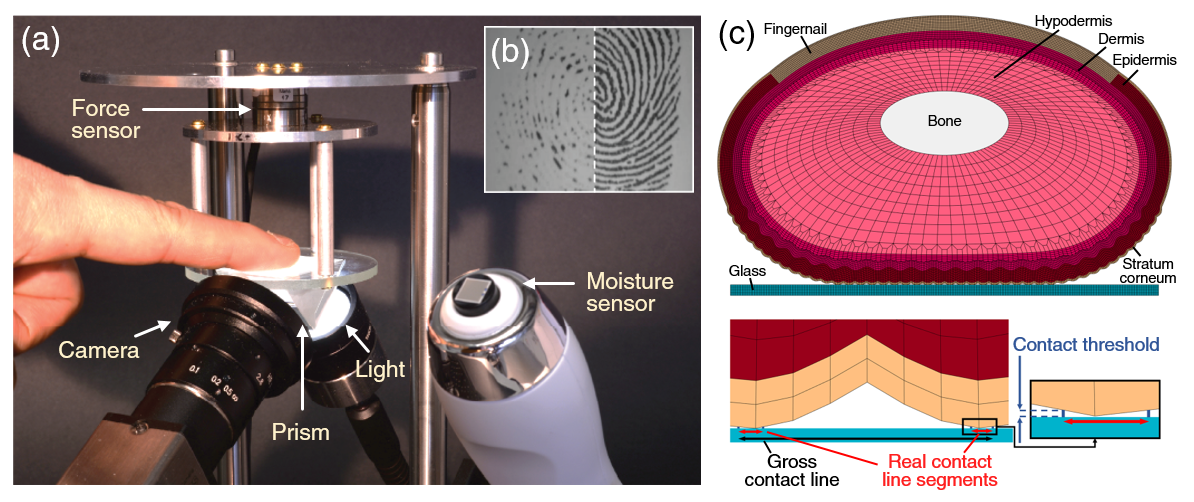
Finger-Surface Contact Mechanics in Diverse Moisture Conditions

Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering

Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects

Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses

Gait Retraining
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery

Haptipedia

Exercise Games with Baxter

Intuitive Social-Physical Robots for Exercise



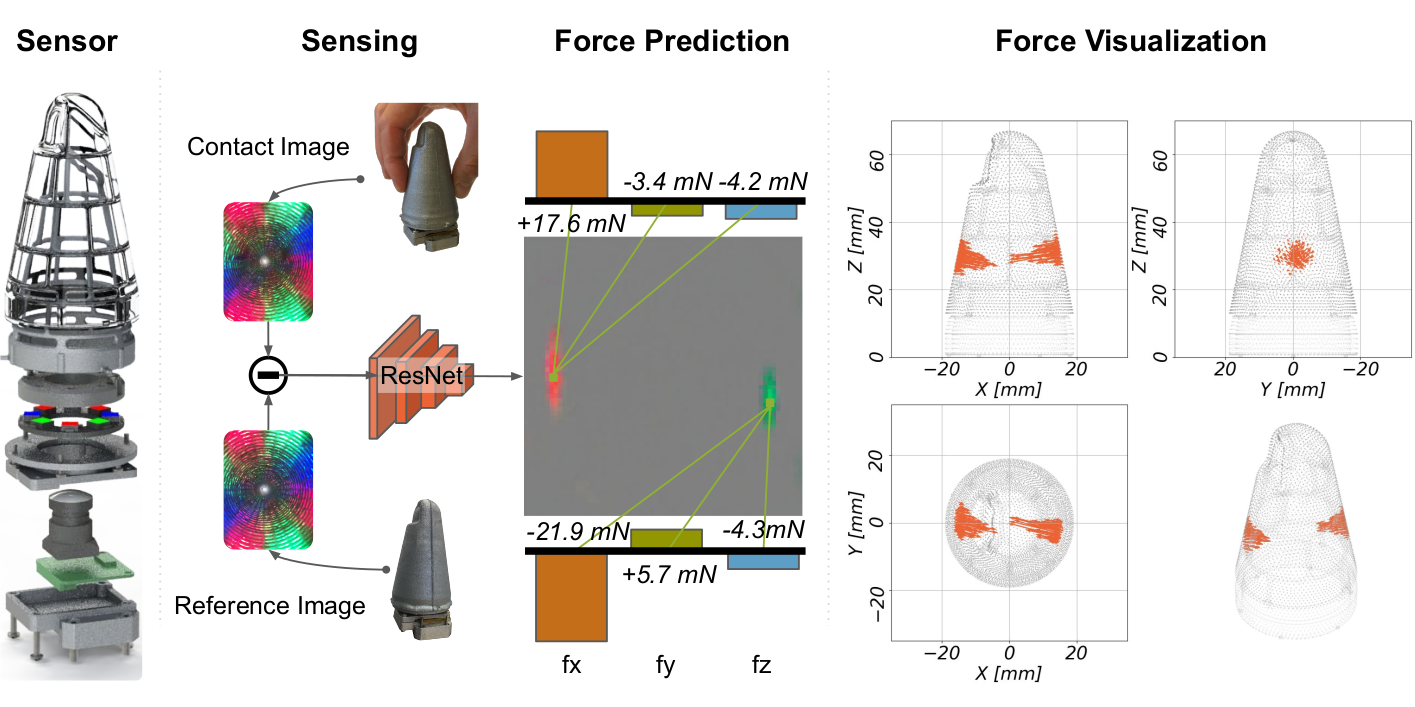
Insight: a Haptic Sensor Powered by Vision and Machine Learning