Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Halbach-Ring Motor Design
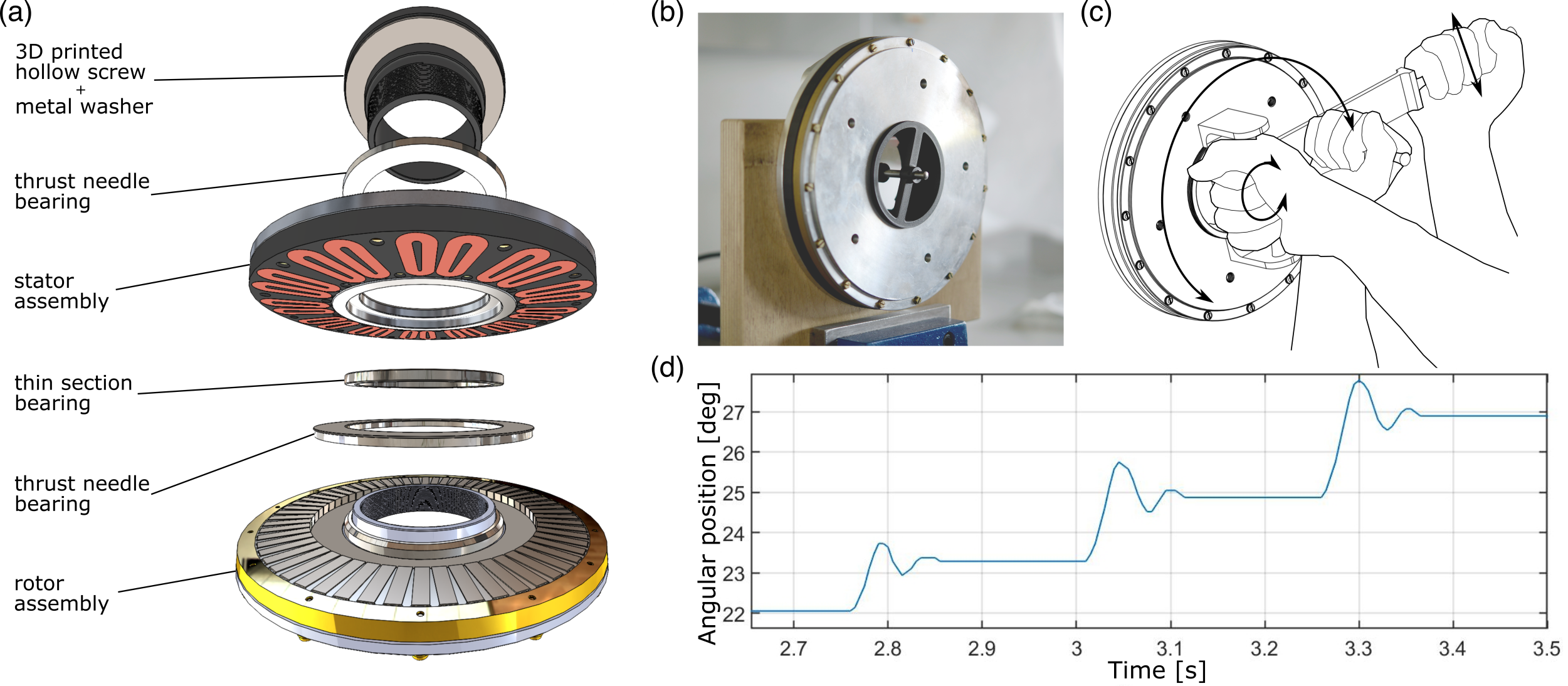
Quality force-feedback devices should supply haptic cues that are both strong and crisp. Delivering such sensations requires the use of high-torque-density motors that rotate smoothly and are capable of operating at near-zero speeds at any angular position. Currently available electric motors fall short of these requirements in direct-drive operation and must thus always be used with a mechanical transmission, which is complex, bulky, and encumbering.
In this project, we design and evaluate a new motor structure: a brushless ironless motor using a Halbach-magnet ring and a planar Lorentz-coil array [![]() ]. The strengthened magnetic field on one side of the magnet ring varies sinusoidally along the circumference of the ring. Our design takes advantage of this attribute by using the two-phase Lorentz coils to interact with the field and thus generate a constant torque at any angular position. This two-phase design allows for a planar coil arrangement instead of overlapped coils as with existing three-phase designs. The two-phase planar coils can be separately made to enhance the fill factor (i.e., effective volume of copper divided by total coil volume) and geometrical accuracy. The motor's torque constant has been both analytically calculated and experimentally verified through torque measurements.
]. The strengthened magnetic field on one side of the magnet ring varies sinusoidally along the circumference of the ring. Our design takes advantage of this attribute by using the two-phase Lorentz coils to interact with the field and thus generate a constant torque at any angular position. This two-phase design allows for a planar coil arrangement instead of overlapped coils as with existing three-phase designs. The two-phase planar coils can be separately made to enhance the fill factor (i.e., effective volume of copper divided by total coil volume) and geometrical accuracy. The motor's torque constant has been both analytically calculated and experimentally verified through torque measurements.
This motor outperforms existing Halbach ring and cylinder motors with a torque constant of 0.78 Nm/A, a record in the field. With a constant amplitude of the two-phase currents, the standard deviation of the measured torque around a full spatial period of the magnet array is within 3% of the nominal torque. We validated our motor design by commanding step responses with and without a torque disturbance at random angular positions. We used a proportional-integral-derivative controller with a refreshing frequency of 200 Hz.
Ongoing work focuses on more detailed characterization of our new motor’s performance compared to the state of the art. Future research will explore the use of this motor in common haptic applications such as upper-limb rehabilitation or the steering wheel of a driving simulator.
Members




Publications