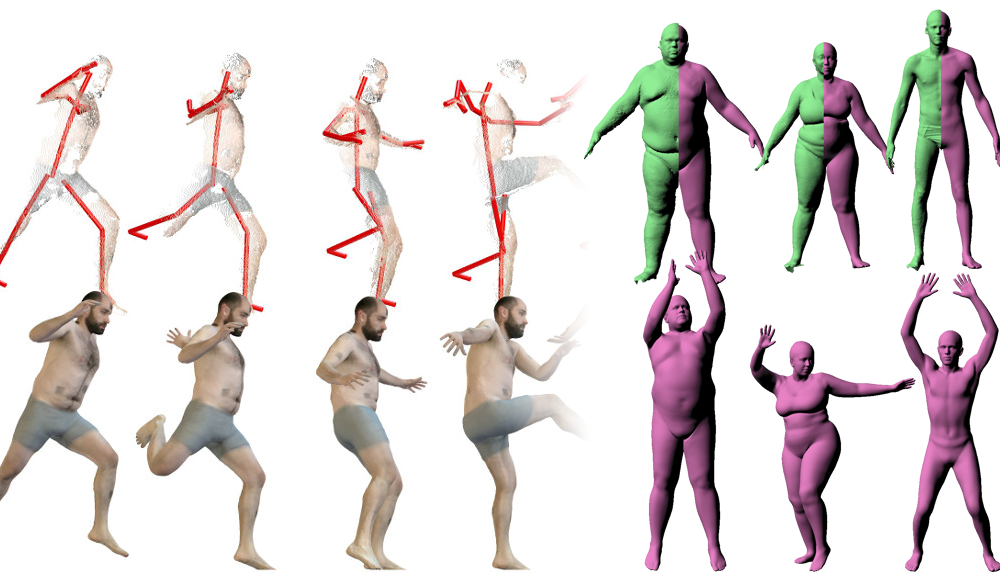
We accurately estimate the 3D geometry and appearance of the human body from a monocular RGB-D sequence of a user moving freely in front of the sensor. Range data in each frame is first brought into alignment with a multi-resolution 3D body model in a coarse-to-fine process. The method then uses geometry and image texture over time to obtain accurate shape, pose, and appearance information despite unconstrained motion, partial views, varying resolution, occlusion, and soft tissue deformation. Our novel body model has variable shape detail, allowing it to capture faces with a high-resolution deformable head model and body shape with lower-resolution. Finally we combine range data from an entire sequence to estimate a high-resolution displacement map that captures fine shape details. We compare our recovered models with high-resolution scans from a professional system and with avatars created by a commercial product. We extract accurate 3D avatars from challenging motion sequences and even capture soft tissue dynamics.
Marker-based motion capture (mocap) is widely criticized as producing lifeless animations. We argue that important information about body surface motion is present in standard marker sets but is lost in extracting a skeleton. We demonstrate a new approach called MoSh (Motion and Shape capture), that automatically extracts this detail from mocap data. MoSh estimates body shape and pose together using sparse marker data by exploiting a parametric model of the human body. In contrast to previous work, MoSh solves for the marker locations relative to the body and estimates accurate body shape directly from the markers without the use of 3D scans; this effectively turns a mocap system into an approximate body scanner. MoSh is able to capture soft tissue motions directly from markers
by allowing body shape to vary over time. We evaluate the effect of different marker sets on pose and shape accuracy and propose a new sparse marker set for capturing soft-tissue motion. We illustrate MoSh by recovering body shape, pose, and soft-tissue motion from archival mocap data and using this to produce animations with subtlety and realism. We also show soft-tissue motion retargeting to new characters and show how to magnify the 3D deformations of soft tissue to create animations with appealing exaggerations.
The 3D shape of the human body is useful for applications in fitness, games and apparel. Accurate body scanners, however, are expensive, limiting the availability of 3D body models. We present a method for human shape reconstruction from noisy monocular image and range data using a single inexpensive commodity sensor. The approach combines low-resolution image silhouettes with coarse range data to estimate a parametric model of the body. Accurate 3D shape estimates are obtained by combining multiple monocular views of a person moving in front of the sensor. To cope with varying body pose, we use a SCAPE body model which factors 3D body shape and pose variations. This enables the estimation of a single consistent shape while allowing pose to vary. Additionally, we describe a novel method to minimize the distance between the projected 3D body contour and the image silhouette that uses analytic derivatives of the objective function. We propose a simple method to estimate standard body measurements from the recovered SCAPE model and show that the accuracy of our method is competitive with commercial body scanning systems costing orders of magnitude more.