HOLD – inferring 3D hand and object shape from video
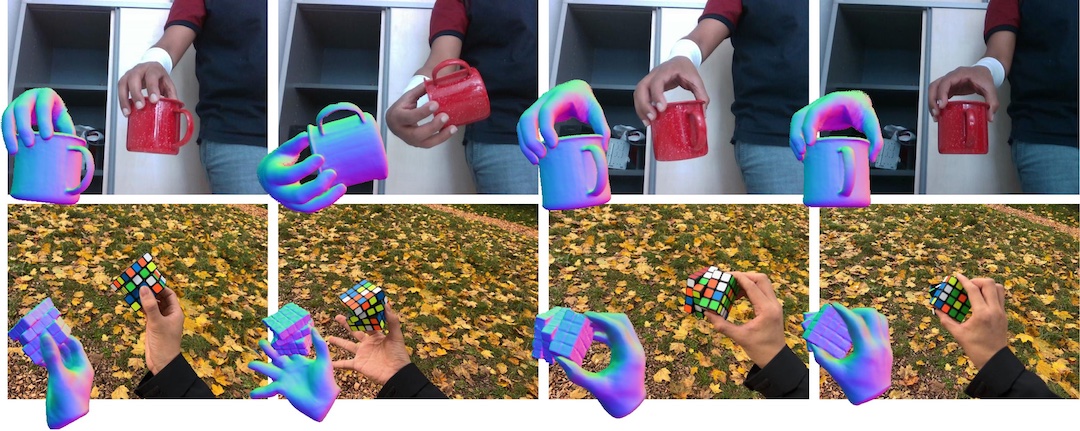
HOLD [] reconstructs detailed 3D geometries of novel objects and hands in interaction from videos. HOLD is agnostic to the object category and trains a compositional articulated implicit model at runtime to disentangle 3D hand and object shape.
Since humans interact with diverse objects every day, the holistic 3D capture of these interactions is important to understand and model human behaviour. However, most existing methods for hand-object reconstruction from RGB either assume pre-scanned object templates or heavily rely on limited 3D hand-object data, restricting their ability to scale and generalize to more unconstrained interaction settings. To this end, we introduce HOLD -- the first category-agnostic method that reconstructs an articulated hand and object jointly from a monocular interaction video. We develop a compositional articulated implicit model that can reconstruct disentangled 3D hand and object from 2D images. We also further incorporate hand-object constraints to improve hand-object poses and consequently the reconstruction quality. Our method does not rely on 3D hand-object annotations while outperforming fully-supervised baselines in both in-the-lab and challenging in-the-wild settings. Moreover, we qualitatively show its robustness in reconstructing from in-the-wild videos.
 ] reconstructs detailed 3D geometries of novel objects and hands in interaction from videos. HOLD is agnostic to the object category and trains a compositional articulated implicit model at runtime to disentangle 3D hand and object shape.
] reconstructs detailed 3D geometries of novel objects and hands in interaction from videos. HOLD is agnostic to the object category and trains a compositional articulated implicit model at runtime to disentangle 3D hand and object shape.