We present a method to evaluate the relative similarity of neural spiking patterns by combining spike train distance metrics with dimensionality reduction. Spike train distance metrics provide an estimate of similarity between activity patterns at multiple temporal resolutions. Vectors of pair-wise distances are used to represent the intrinsic relationships between multiple activity patterns at the level of single units or neuronal ensembles. Dimensionality reduction is then used to project the data into concise representations suitable for clustering analysis as well as exploratory visualization. Algorithm performance and robustness are evaluated using multielectrode ensemble activity data recorded in behaving primates. We demonstrate how Spike train SIMilarity Space (SSIMS) analysis captures the relationship between goal directions for an 8-directional reaching task and successfully segregates grasp types in a 3D grasping task in the absence of kinematic information. The algorithm enables exploration of virtually any type of neural spiking (time series) data, providing similarity-based clustering of neural activity states with minimal assumptions about potential information encoding models.
Intracortical brain computer interfaces (iBCIs) decode intended movement from neural activity for the control of external devices such as a robotic arm. Standard approaches include a calibration phase to estimate decoding parameters. During iBCI operation, the statistical properties of the neural activity can depart from those observed during calibration, sometimes hindering a user’s ability to control the iBCI. To address this problem, we adaptively correct the offset terms within a Kalman filter decoder via penalized maximum likelihood estimation. The approach can handle rapid shifts in neural signal behavior (on the order of seconds) and requires no knowledge of the intended movement. The algorithm, called MOCA, was tested using simulated neural activity and evaluated retrospectively using data collected from two people with tetraplegia operating an iBCI. In 19 clinical research test cases, where a nonadaptive Kalman filter yielded relatively high decoding errors, MOCA significantly reduced these errors (10.6 ± 10.1\%; p < 0.05, pairwise t-test). MOCA did not significantly change the error in the remaining 23 cases where a nonadaptive Kalman filter already performed well. These results suggest that MOCA provides more robust decoding than the standard Kalman filter for iBCIs.
Kalman filtering is a common method to decode neural signals from the motor cortex. In clinical research investigating the use of intracortical brain computer interfaces (iBCIs), the technique enabled people with tetraplegia to control assistive devices such as a computer or robotic arm directly from their neural activity. For reaching movements, the Kalman filter typically estimates the instantaneous endpoint velocity of the control device. Here, we analyzed attempted arm/hand movements by people with tetraplegia to control a cursor on a computer screen to reach several circular targets. A standard velocity Kalman filter is enhanced to additionally decode for the cursor’s position. We then mix decoded velocity and position to generate cursor movement commands. We analyzed data, offline, from two participants across six sessions. Root mean squared error between the actual and estimated
cursor trajectory improved by 12.2 ±10.5% (pairwise t-test, p<0.05) as compared to a standard velocity Kalman filter. The findings suggest that simultaneously decoding for intended velocity and position and using them both to generate movement commands can improve the performance of iBCIs.
We present a point-and-click intracortical neural interface system (NIS) that enables humans with tetraplegia to volitionally move a 2D computer cursor in any desired direction on a computer screen, hold it still and click on the area of interest. This direct brain-computer interface extracts both discrete (click) and continuous (cursor velocity) signals from a single small population of neurons in human motor cortex. A key component of this system is a multi-state probabilistic decoding algorithm that simultaneously decodes neural spiking activity and outputs either a click signal or the velocity of the cursor. The algorithm combines a linear classifier, which determines whether the user is intending to click or move the cursor, with a Kalman filter that translates the neural population activity into cursor velocity. We present a paradigm for training the multi-state decoding algorithm using neural activity observed during imagined actions. Two human participants with tetraplegia (paralysis of the four limbs) performed a closed-loop radial target acquisition task using the point-and-click NIS over multiple sessions. We quantified point-and-click performance using various human-computer interaction measurements for pointing devices. We found that participants were able to control the cursor motion accurately and click on specified targets with a small error rate (< 3% in one participant). This study suggests that signals from a small ensemble of motor cortical neurons (~40) can be used for natural point-and-click 2D cursor control of a personal computer.
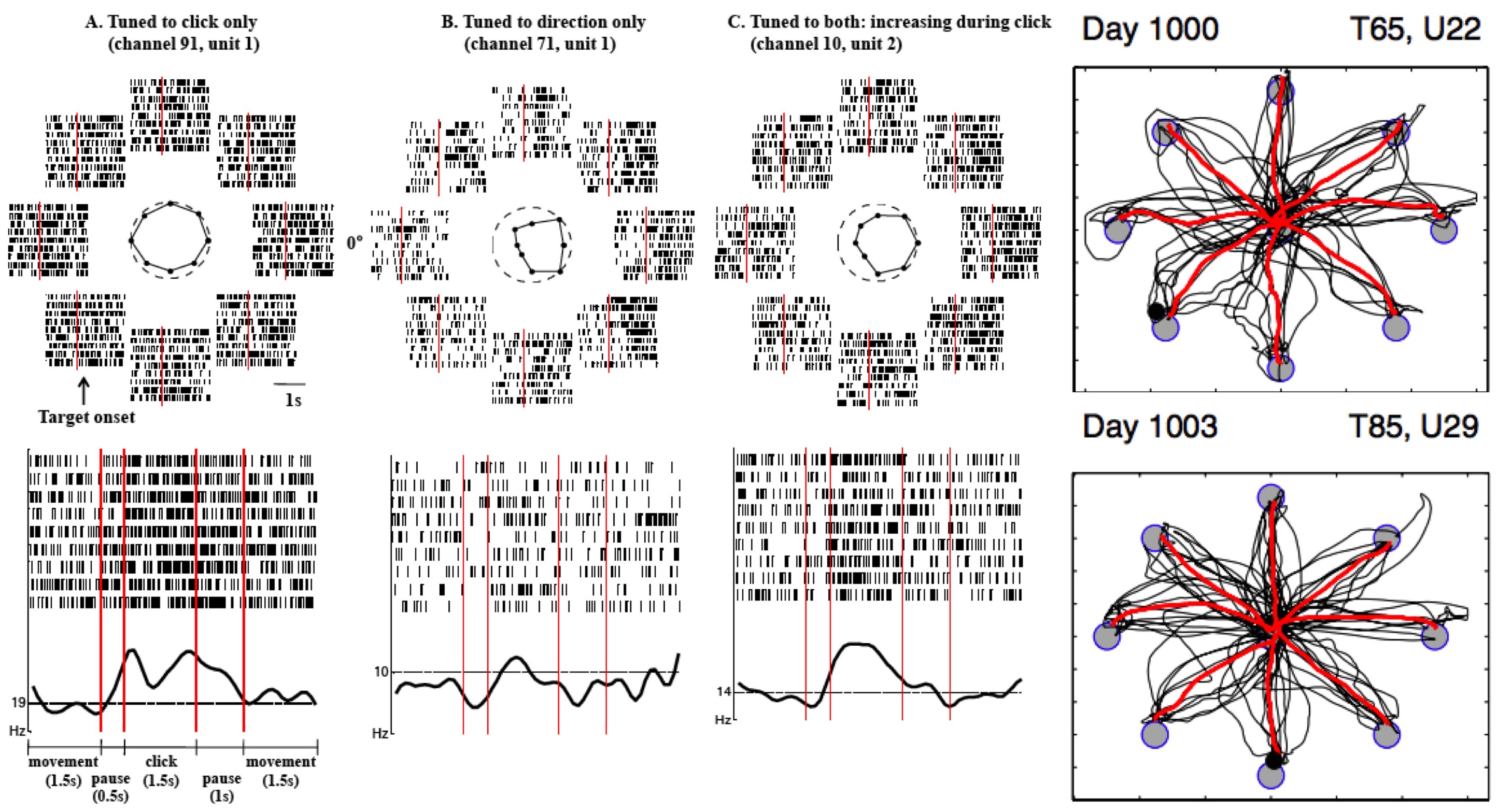
The ongoing pilot clinical trial of the BrainGate neural interface system aims in part to assess the feasibility of using neural activity obtained from a small-scale, chronically implanted, intracortical microelectrode array to provide control signals for a neural prosthesis system. Critical questions include how long implanted microelectrodes will record useful neural signals, how reliably those signals can be acquired and decoded, and how effectively they can be used to control various assistive technologies such as computers and robotic assistive devices, or to enable functional electrical stimulation of paralyzed muscles. Here we examined these questions by assessing neural cursor control and BrainGate system characteristics on five consecutive days 1000 days after implant of a 4 × 4 mm array of 100 microelectrodes in the motor cortex of a human with longstanding tetraplegia subsequent to a brainstem stroke. On each of five prospectively-selected days we performed time-amplitude sorting of neuronal spiking activity, trained a population-based Kalman velocity decoding filter combined with a linear discriminant click state classifier, and then assessed closed-loop point-and-click cursor control. The participant performed both an eight-target center-out task and a random target Fitts metric task which was adapted from a human-computer interaction ISO standard used to quantify performance of computer input devices. The neural interface system was further characterized by daily measurement of electrode impedances, unit waveforms and local field potentials. Across the five days, spiking signals were obtained from 41 of 96 electrodes and were successfully decoded to provide neural cursor point-and-click control with a mean task performance of 91.3% ± 0.1% (mean ± s.d.) correct target acquisition. Results across five consecutive days demonstrate that a neural interface system based on an intracortical
microelectrode array can provide repeatable, accurate point-and-click control of a computer interface to an individual with tetraplegia 1000 days after implantation of this sensor.