Re-Thinking Inverse Graphics with Large Language Models
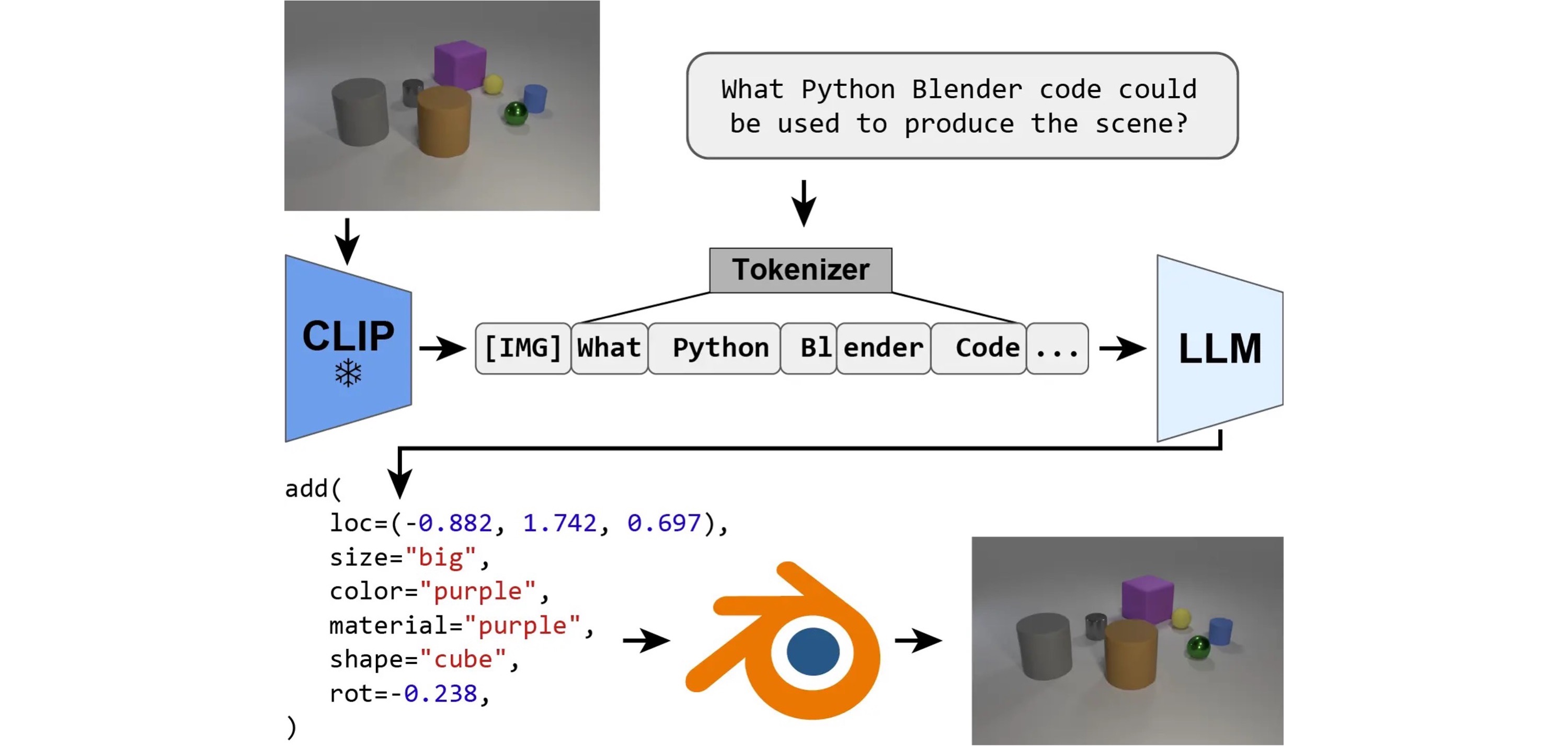
Inverse graphics -the task of inverting an image into physical variables that, when rendered, enable reproduction of the observed scene- is a fundamental challenge in computer vision and graphics. Successfully disentangling an image into its constituent elements, such as the shape, color, and material properties of the objects of the 3D scene that produced it, requires a comprehensive understanding of the environment. This complexity limits the ability of existing carefully engineered approaches to generalize across domains. Inspired by the zero-shot ability of large language models (LLMs) to generalize to novel contexts, we investigate the possibility of leveraging the broad world knowledge encoded in such models to solve inverse-graphics problems. To this end, we propose the Inverse-Graphics Large Language Model (IG-LLM), an inverse-graphics framework centered around an LLM, that autoregressively decodes a visual embedding into a structured, compositional 3D-scene representation. We incorporate a frozen pre-trained visual encoder and a continuous numeric head to enable end-to-end training. Through our investigation, we demonstrate the potential of LLMs to facilitate inverse graphics through next-token prediction, without the application of image-space supervision. Our analysis enables new possibilities for precise spatial reasoning about images that exploit the visual knowledge of LLMs. We release our code and data to ensure the reproducibility of our investigation and to facilitate future research.

Members



Publications