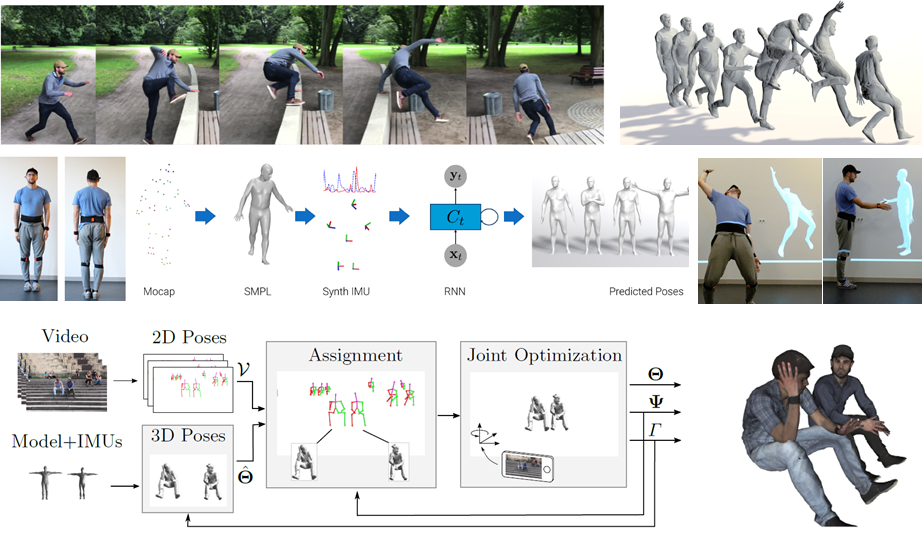
We demonstrate a novel deep neural network capable of reconstructing human full body pose in real-time from 6 Inertial Measurement Units (IMUs) worn on the user's body. In doing so, we address several difficult challenges. First, the problem is severely under-constrained as multiple pose parameters produce the same IMU orientations. Second, capturing IMU data in conjunction with ground-truth poses is expensive and difficult to do in many target application scenarios (e.g., outdoors). Third, modeling temporal dependencies through non-linear optimization has proven effective in prior work but makes real-time prediction infeasible. To address this important limitation, we learn the temporal pose priors using deep learning. To learn from sufficient data, we synthesize IMU data from motion capture datasets. A bi-directional RNN architecture leverages past and future information that is available at training time. At test time, we deploy the network in a sliding window fashion, retaining real time capabilities. To evaluate our method, we recorded DIP-IMU, a dataset consisting of 10 subjects wearing 17 IMUs for validation in 64 sequences with 330,000 time instants; this constitutes the largest IMU dataset publicly available. We quantitatively evaluate our approach on multiple datasets and show results from a real-time implementation. DIP-IMU and the code are available for research purposes.
In this work, we propose a method that combines a single hand-held camera and a set of Inertial Measurement Units (IMUs) attached at the body limbs to estimate accurate 3D poses in the wild. This poses many new challenges: the moving camera, heading drift, cluttered background, occlusions and many people visible in the video. We associate 2D pose detections in each image to the corresponding IMU-equipped persons by solving a novel graph based optimization problem that forces 3D to 2D coherency within a frame and across long range frames. Given associations, we jointly optimize the pose of a statistical body model, the camera pose and heading drift using a continuous optimization framework. We validated our method on the TotalCapture dataset, which provides video and IMU synchronized with ground truth. We obtain an accuracy of 26mm, which makes it accurate enough to serve as a benchmark for image-based 3D pose estimation in the wild. Using our method, we recorded 3D Poses in the Wild (3DPW ), a new dataset consisting of more than 51; 000 frames with accurate
3D pose in challenging sequences, including walking in the city, going up-stairs, having co ffee or taking the bus. We make the reconstructed 3D poses, video, IMU and 3D models available for research purposes at http://virtualhumans.mpi-inf.mpg.de/3DPW.
We address the problem of making human motion capture in the wild more practical by using a small set of inertial sensors attached to the body. Since the problem is heavily under-constrained, previous methods either use a large number of sensors, which is intrusive, or they require additional video input. We take a different approach and constrain the problem by: (i) making use of a realistic statistical body model that includes anthropometric constraints and (ii) using a joint optimization framework to fit the model to orientation and acceleration measurements over multiple frames. The resulting tracker Sparse Inertial Poser (SIP) enables motion capture using only 6 sensors (attached to the wrists, lower legs, back and head) and works for arbitrary human motions. Experiments on the recently released TNT15 dataset show that, using the same number of sensors, SIP achieves higher accuracy than the dataset baseline without using any video data. We further demonstrate the effectiveness of SIP on newly recorded challenging motions in outdoor scenarios such as climbing or jumping over a wall