Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Causal Reasoning in RL
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Haptic Sensing

The rapid evolution of robotic technologies informs practical benefits in various physical application areas. In complex, changing, and especially human-involved scenarios, a robot must be well-equipped to perceive the interactions between its own body and other things. Due to the visual occlusion and the small scale of the deformations during interactions, robots need touch-sensitive skin in addition to well-developed vision feedback. In this research field, we explore creating durable and robust haptic sensors to meet various application requirements and design machine-learning algorithms to enhance the data processing flow.
Projects
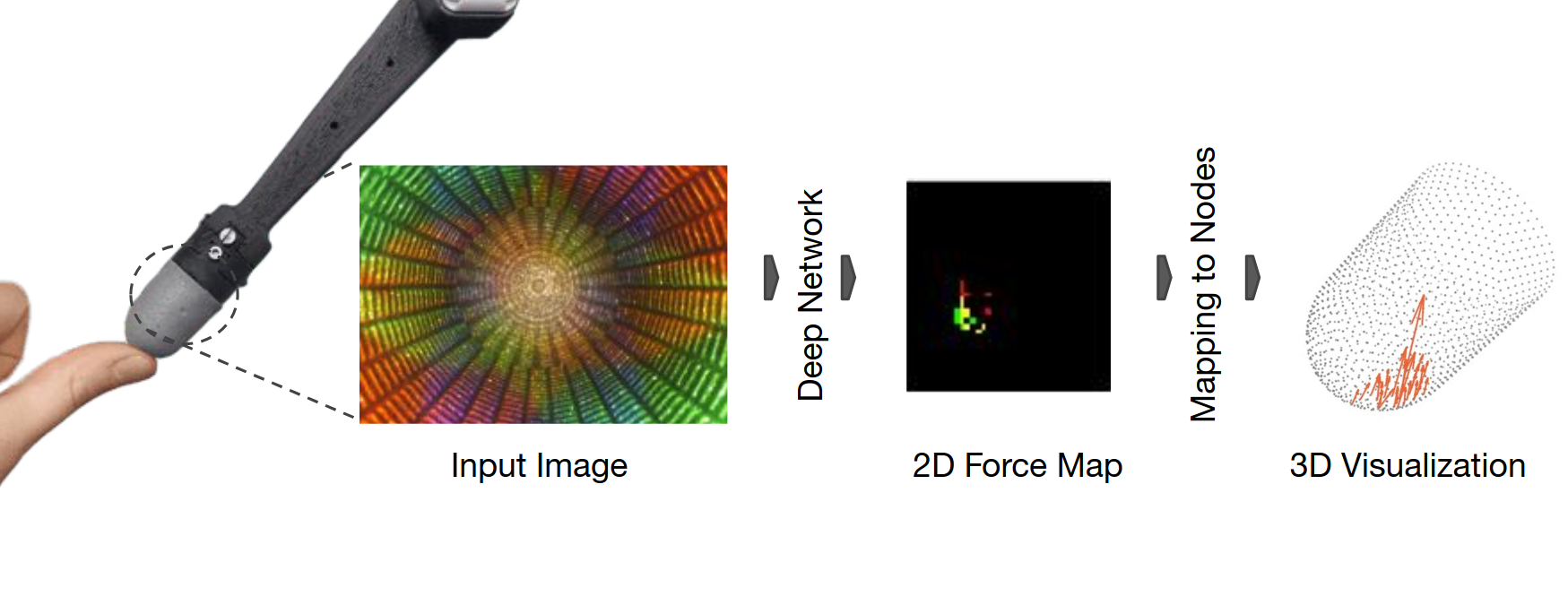
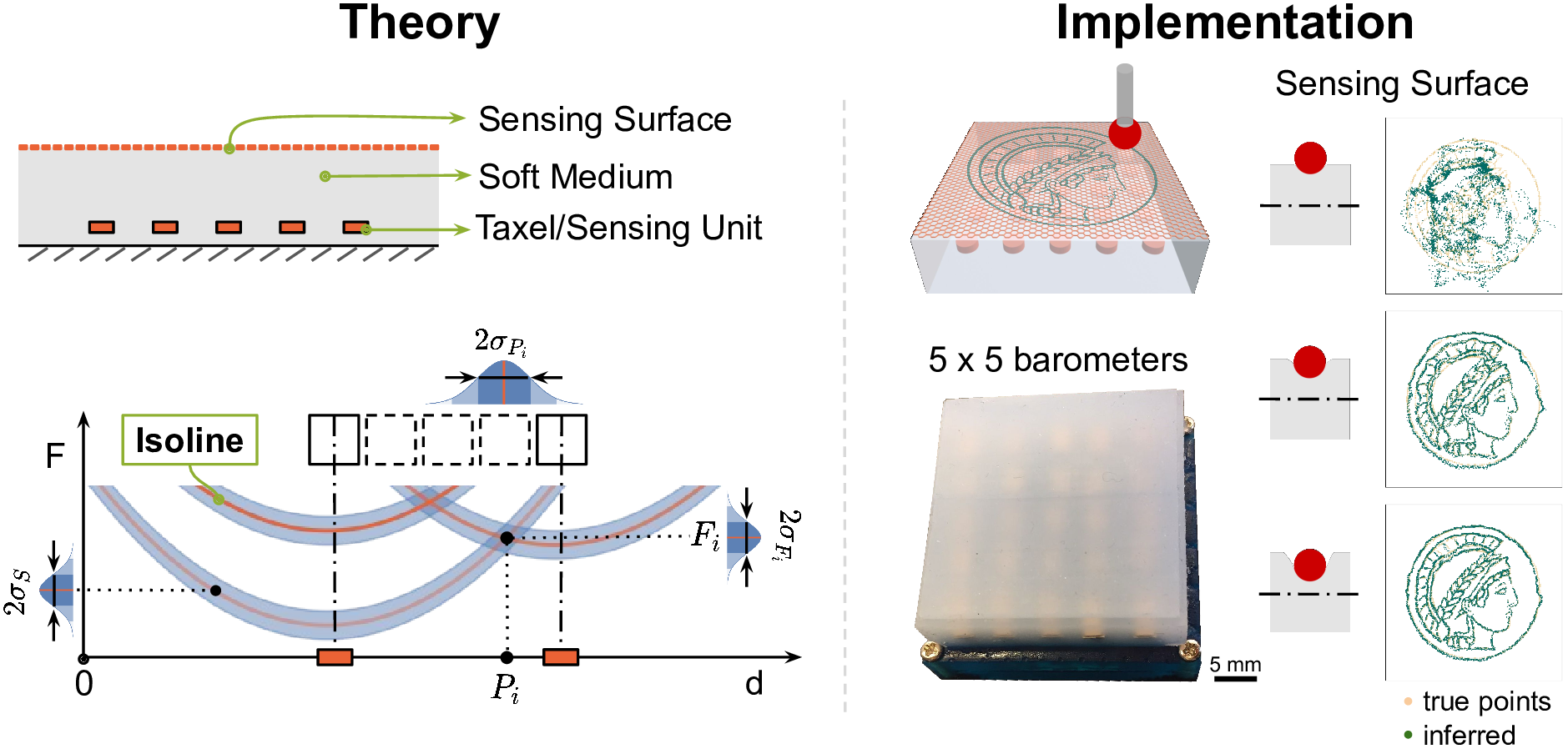
Super-resolution Sensing for Haptics
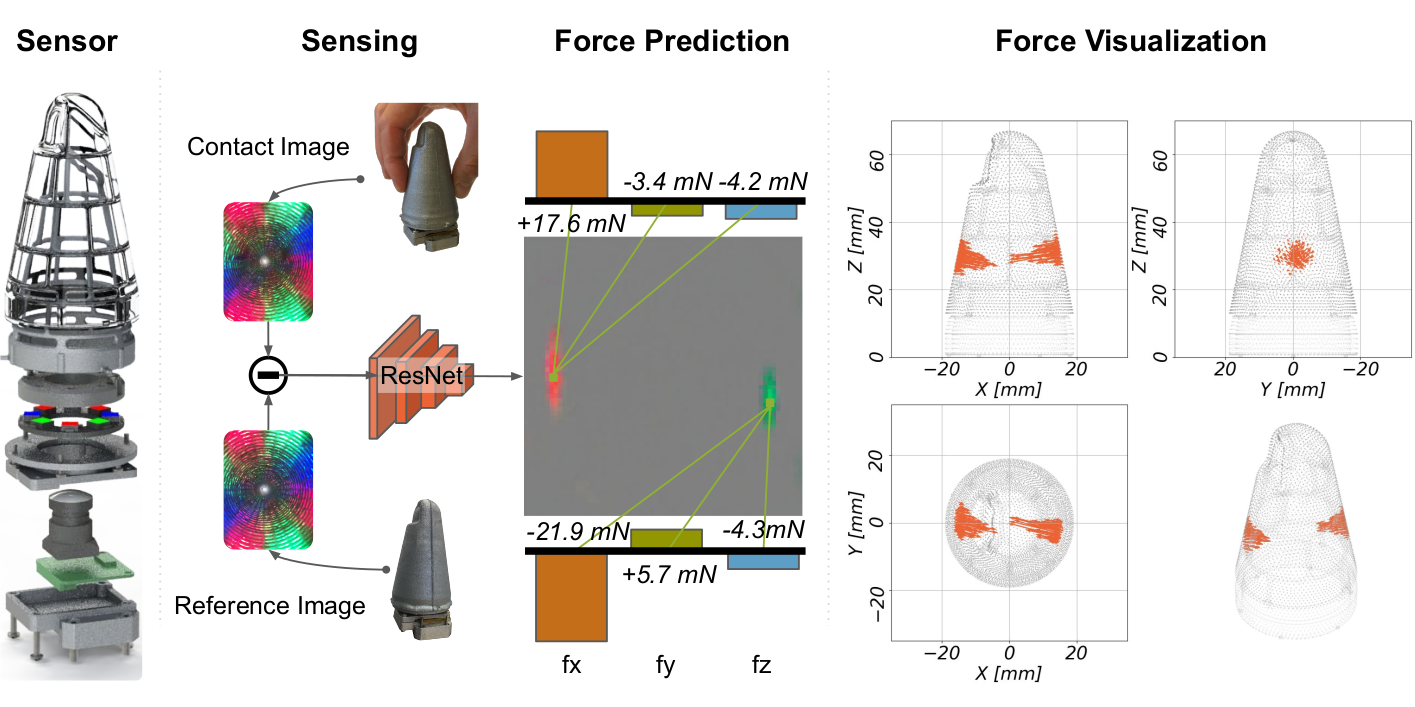
Insight: a Haptic Sensor Powered by Vision and Machine Learning