Research conducted by members of the group prior to joining the Max-Planck-Institute for Intelligent Systems is presented in this category.
Projects
Autonomous robots may become our closest companions in the near future. While the technology for physically building such machines is already available today, a problem lies in the generation of the behavior for such complex machines....
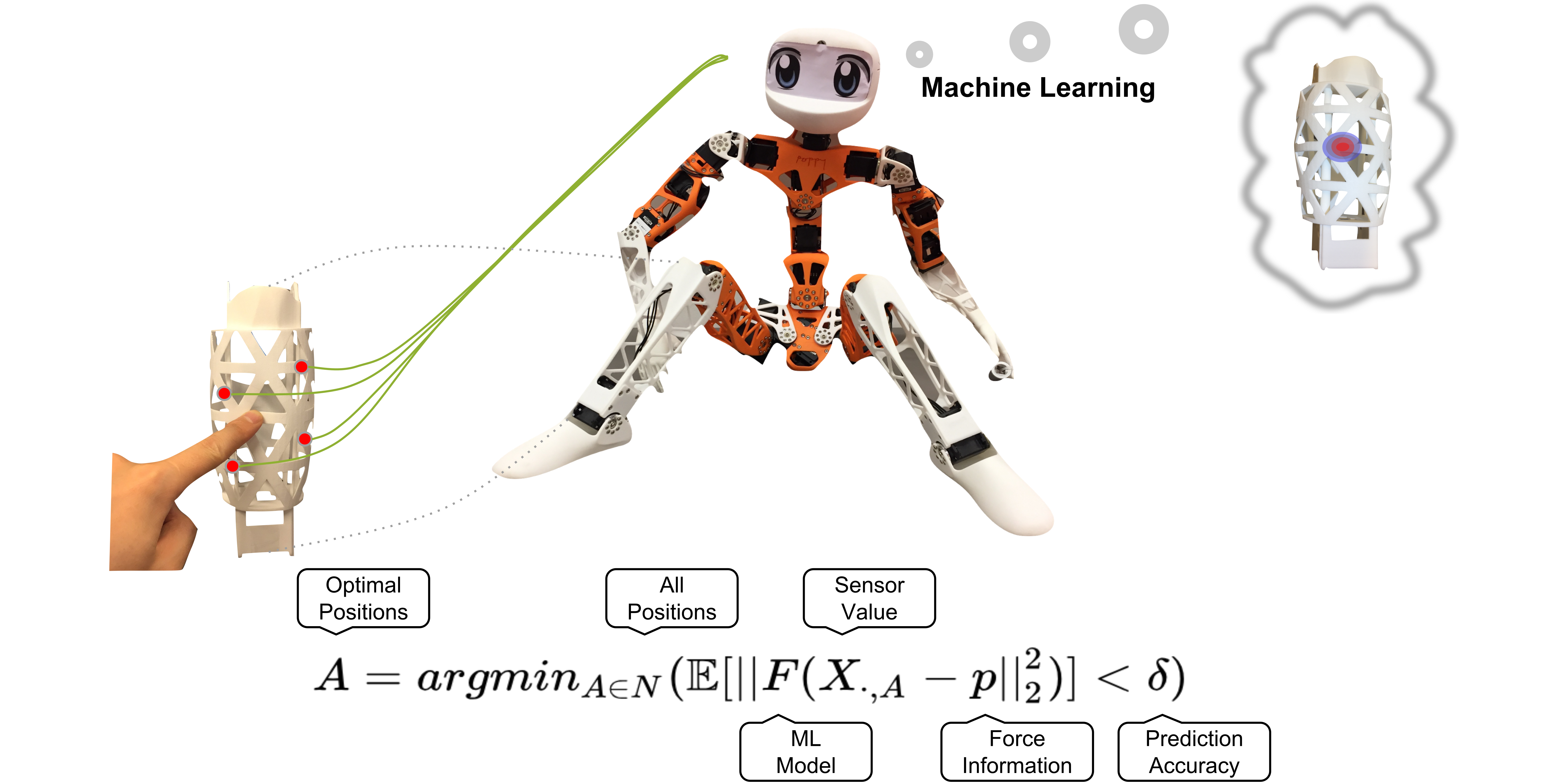
During the rapid development of robot technologies, actuators and sensors have become increasingly compact and powerful. Nevertheless, robots are still far from matching human capabilities especially when it comes to touch...
Read more
This website uses cookies to ensure you get the best experience. Learn more.