Reinforcement Learning and Control
Model-based Reinforcement Learning and Planning
Causal Reasoning in RL
Intrinsically Motivated Hierarchical Learner
Regularity as Intrinsic Reward for Free Play
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
Natural and Robust Walking from Generic Rewards
Goal-conditioned Offline Planning
Offline Diversity Under Imitation Constraints
Learning Diverse Skills for Local Navigation
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
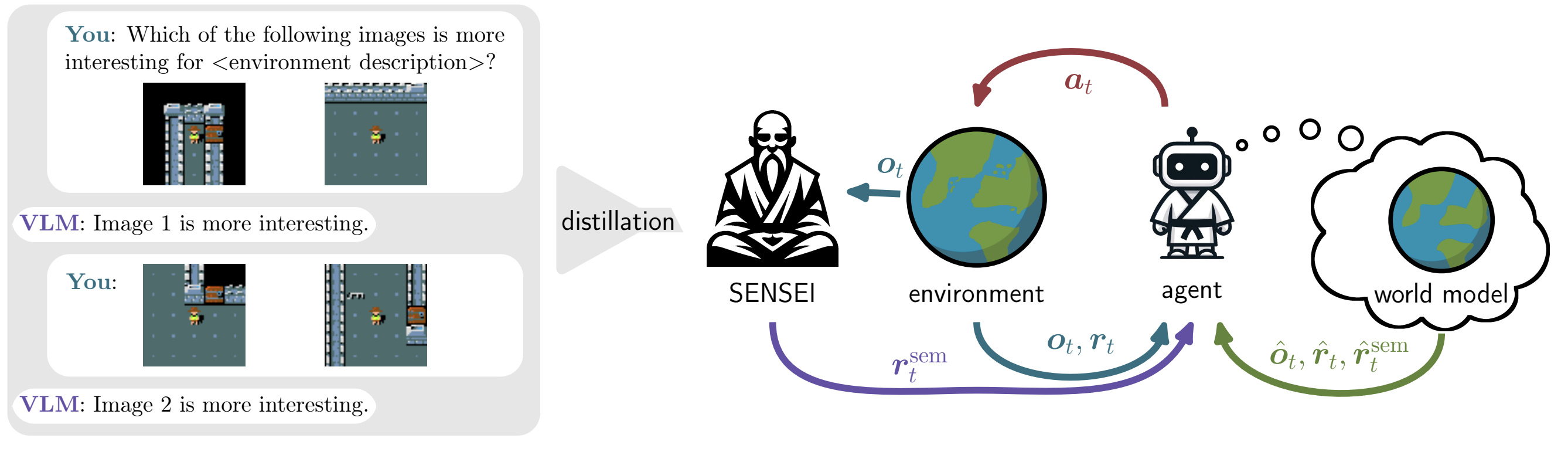
SENSEI: Semantic Exploration Guided by Foundation Models to Learn Versatile World Models
Abstract: We study how to come closer to children's play that show engagement in high-level behaviors through imitation. Recent research uses foundation models to introduce these semantic biases into exploration, but they often have unrealistic assumptions like pre-embedded language environments. To address this, we propose SEmaNtically Sensible ExploratIon (SENSEI), a framework enabling model-based RL agents to pursue semantically meaningful behavior.
Exploring useful behavior is a keystone of reinforcement learning (RL). Existing approaches to intrinsic motivation, following general principles such as information gain, mostly uncover low-level interactions. In contrast, children’s play suggests that they engage in semantically meaningful high-level behavior by imitating or interacting with their caregivers. Recent work has focused on using foundation models to inject these semantic biases into exploration. However, these methods often rely on unrealistic assumptions, such as environments already embedded in language or access to high-level actions. To bridge this gap, we propose SEmaNtically Sensible ExploratIon (SENSEI), a framework to equip model-based RL agents with intrinsic motivation for semantically meaningful behavior.
Exploring useful behavior is a keystone of reinforcement learning (RL). Existing approaches to intrinsic motivation, following general principles such as information gain, mostly uncover low-level interactions. In contrast, children’s play suggests that they engage in semantically meaningful high-level behavior by imitating or interacting with their caregivers. Recent work has focused on using foundation models to inject these semantic biases into exploration. However, these methods often rely on unrealistic assumptions, such as environments already embedded in language or access to high-level actions. To bridge this gap, we propose SEmaNtically Sensible ExploratIon (Sensei), a framework to equip model-based RL agents with intrinsic motivation for semantically meaningful behavior. To do so, we distill an intrinsic reward signal of interestingness from Vision Language Model (VLM) annotations. The agent learns to predict and maximize these intrinsic rewards using a world model learned directly from intrinsic rewards, image observations, and low-level actions. We show that in both robotic and video game-like simulations Sensei manages to discover a variety of meaningful behaviors. We believe Sensei provides a general tool for integrating feedback from foundation models into autonomous agents, a crucial research direction as openly available VLMs become more powerful.
Members





Publications