Embodied Vision
Members
Publications
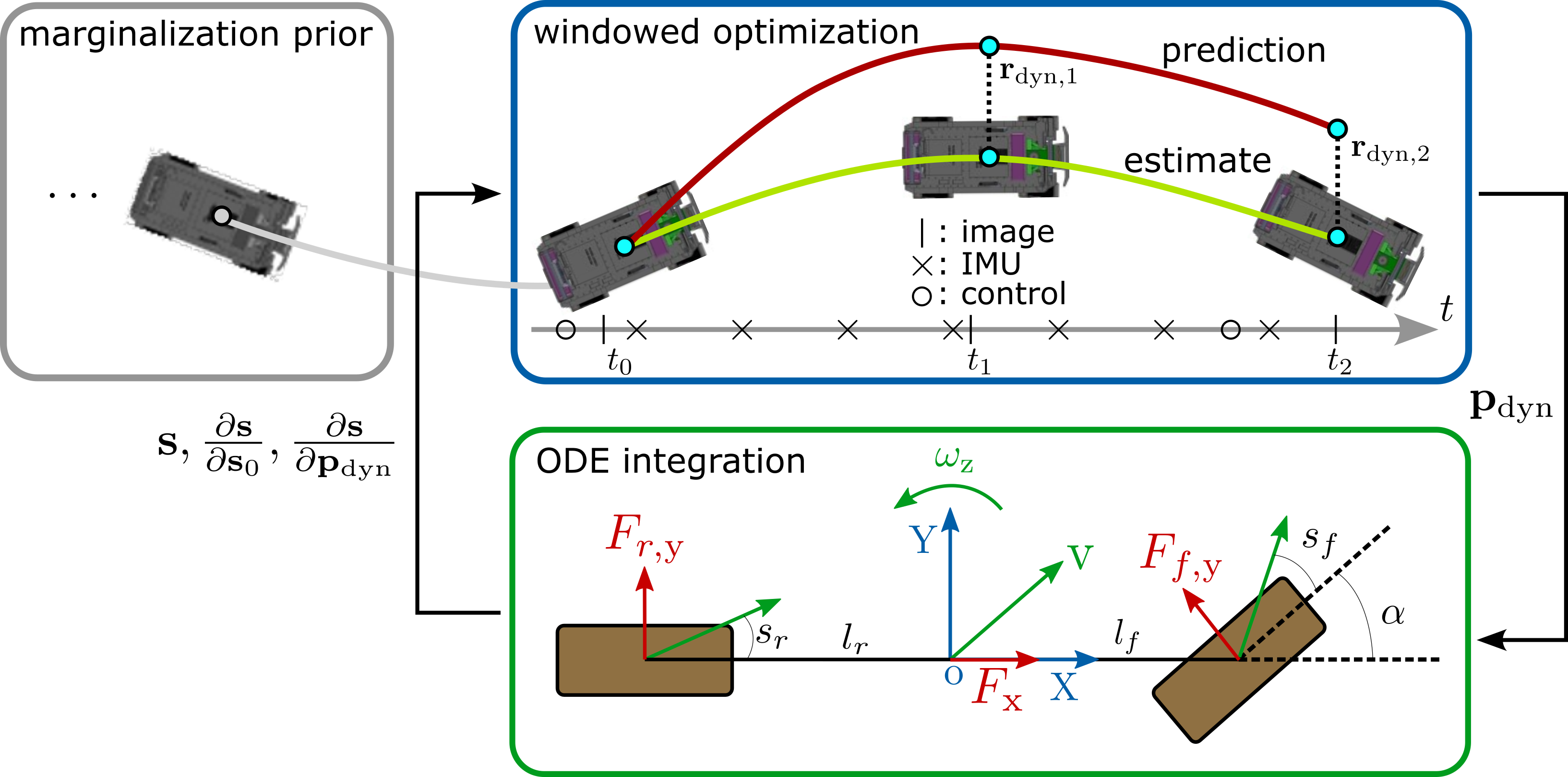
ST-VIO tightly integrates visual, inertial, and dynamic motion constraints and calibrates the motion model online. © IEEE. Reprinted, with permission, from [ ].
].




Visual-Inertial State Estimation with Online Adaptation of Mobile Robot Dynamics Models
In our works [], we investigate visual-inertial odometry approaches that enable wheeled robots to estimate their 3D motion in real-time and adapt the kinematic or dynamic model of the robot online to variations of robot and terrain properties. Kin-VIO [] adapts parameters of the mapping from velocity controls to an effective control command for a kinematic velocity-based motion model. In ST-VIO [] a single-track dynamic model formulated as an ODE is used to predict robot motion. Several of its parameters which map steering angle and thrust commands to robot motion are calibrated online.
n/a
Members
Embodied Vision
Publications
Embodied Vision
Conference Paper
Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry
Li, H., Stueckler, J.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2024 (Published)
preprint
supplemental video
code
datasets
DOI
URL
BibTeX
Embodied Vision
Autonomous Motion
Movement Generation and Control
Conference Paper
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
Dhédin, V., Li, H., Khorshidi, S., Mack, L., Ravi, A. K. C., Meduri, A., Shah, P., Grimminger, F., Righetti, L., Khadiv, M., et al.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2023 (Published)
preprint
video
DOI
URL
BibTeX
Embodied Vision
Article
Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
Li, H., Stueckler, J.
IEEE Robotics and Automation Letters, 7(3):6415-6422, July 2022, Accepted for oral presentation at IEEE ICRA 2023 (Published)
preprint
DOI
URL
BibTeX
Embodied Vision
Article
Visual-Inertial Mapping with Non-Linear Factor Recovery
Usenko, V., Demmel, N., Schubert, D., Stückler, J., Cremers, D.
IEEE Robotics and Automation Letters (RA-L), 5(2):422-429, 2020, presented at IEEE International Conference on Robotics and Automation (ICRA) 2020, preprint arXiv:1904.06504 (Published)
Code
Preprint
URL
BibTeX
Embodied Vision
Conference Paper
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry
Yang, N., Wang, R., Stueckler, J., Cremers, D.
In European Conference on Computer Vision (ECCV), September 2018, oral presentation, preprint https://arxiv.org/abs/1807.02570 (Published)
URL
BibTeX
Embodied Vision
Conference Paper
Direct Sparse Odometry With Rolling Shutter
Schubert, D., Usenko, V., Demmel, N., Stueckler, J., Cremers, D.
In European Conference on Computer Vision (ECCV), September 2018, oral presentation (Published)
BibTeX
Embodied Vision
Article
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras
Matsuki, H., von Stumberg, L., Usenko, V., Stueckler, J., Cremers, D.
IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robots and Systems (IROS), Robotics and Automation Letters (RA-L), IEEE, 2018
BibTeX
Embodied Vision
Conference Paper
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry
Schubert, D., Goll, T., Demmel, N., Usenko, V., Stueckler, J., Cremers, D.
In IEEE International Conference on Intelligent Robots and Systems (IROS), 2018, arXiv:1804.06120
BibTeX
Embodied Vision
Conference Paper
Keyframe-Based Visual-Inertial Online SLAM with Relocalization
Kasyanov, A., Engelmann, F., Stueckler, J., Leibe, B.
In IEEE/RSJ Int. Conference on Intelligent Robots and Systems,
IROS, 2017
BibTeX
Embodied Vision
Conference Paper
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM
Ma, L., Kerl, C., Stueckler, J., Cremers, D.
In IEEE International Conference on Robotics and Automation (ICRA), 2016
BibTeX
Embodied Vision
Conference Paper
Direct Visual-Inertial Odometry with Stereo Cameras
Usenko, V., Engel, J., Stueckler, J., Cremers, D.
In IEEE International Conference on Robotics and Automation (ICRA), 2016
BibTeX
Embodied Vision
Conference Paper
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras
Kerl, C., Stueckler, J., Cremers, D.
In IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 2015
BibTeX
Embodied Vision
Conference Paper
Large-Scale Direct SLAM with Stereo Cameras
Engel, J., Stueckler, J., Cremers, D.
In IEEE International Conference on Intelligent Robots and Systems (IROS), 2015 (Published)
BibTeX
Embodied Vision
Conference Paper
Reconstructing Street-Scenes in Real-Time From a Driving Car
Usenko, V., Engel, J., Stueckler, J., Cremers, D.
In Proc. of the Int. Conference on 3D Vision (3DV), October 2015
BibTeX
Embodied Vision
Conference Paper
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures
Maier, R., Stueckler, J., Cremers, D.
In International Conference on 3D Vision (3DV), 2015
BibTeX
Embodied Vision
Conference Paper
Combining the Strengths of Sparse Interest Point and Dense Image Registration for RGB-D Odometry
Stueckler, J., Gutt, A., Behnke, S.
In Proc. of the Joint 45th International Symposium on Robotics (ISR) and 8th German Conference on Robotics (ROBOTIK), 2014
URL
BibTeX
Embodied Vision
Article
Multi-Resolution Surfel Maps for Efficient Dense 3D Modeling and Tracking
Stueckler, J., Behnke, S.
Journal of Visual Communication and Image Representation (JVCI), 25(1):137-147, 2014
DOI
URL
BibTeX