Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
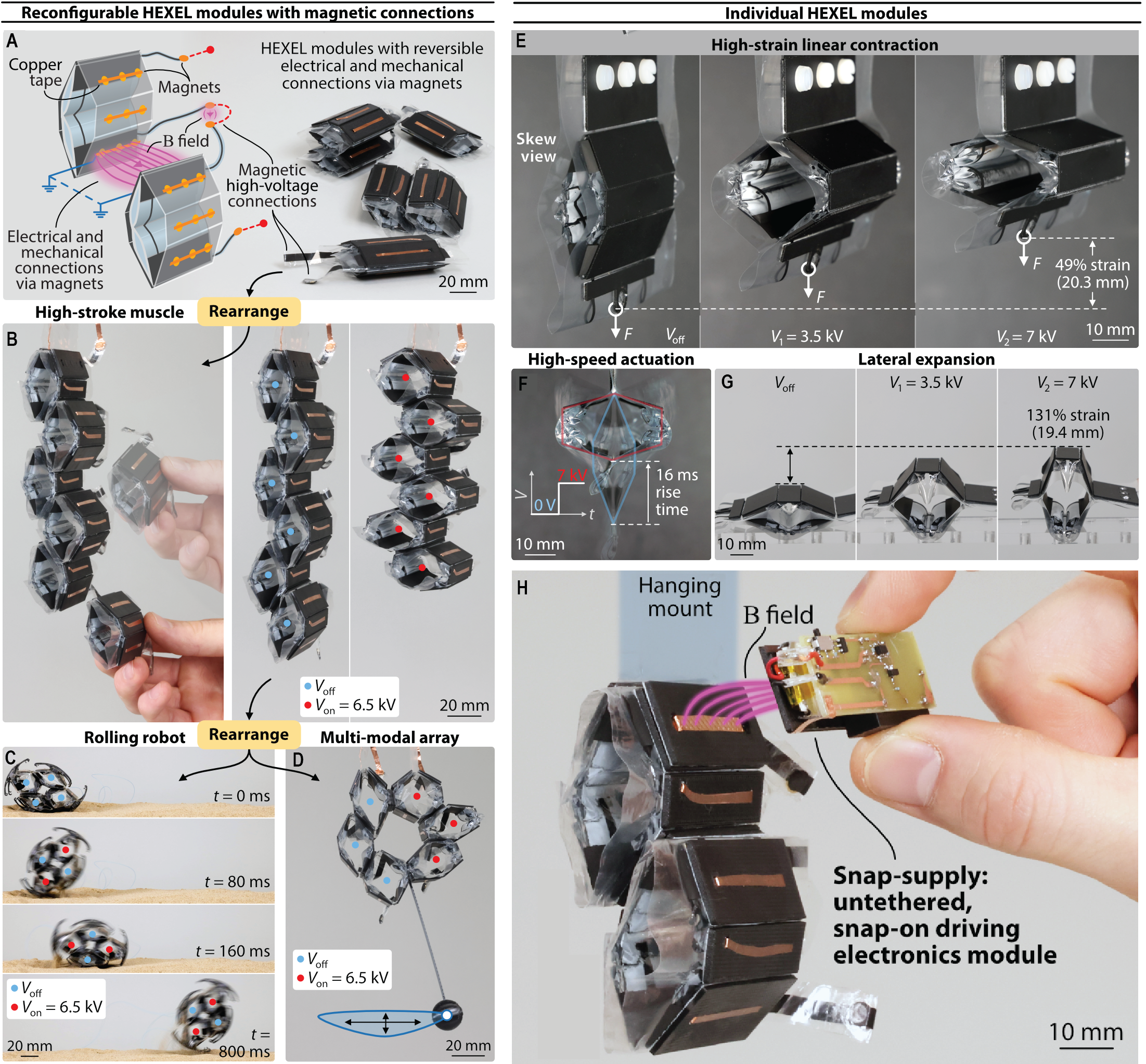
Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots
Zachary Yoder, Ellen Rumley, Ingemar Schmidt, Philipp Rothemund, and Christoph Keplinger, Science Robotics, 2024 [![]() ]
]
Robots made from reconfigurable modular units feature versatility, cost efficiency, and improved sustainability compared with fixed designs. Reconfigurable modules driven by soft actuators provide adaptable actuation, safe interaction, and wide design freedom, but existing soft modules would benefit from high-speed and high-strain actuation, as well as driving methods well-suited to untethered operation.
In this project, we introduce hexagonal electrohydraulic (HEXEL) modules which blend soft electrohydraulic actuators with rigid components to amplify the motion of actuators into large, high-speed contraction. HEXELs feature contractile strains of 49%, peak strain rate of 4,618%/s. and lateral expansion; a combination of features enabling high-jumping robots and fast-crawling robots.
The rigid components offer a workspace for embedding reversible, magnetic connections between modules, enabling their use as reconfigurable arrays. The same group of modules can therefore connect into diverse arrangements – attaching modules in series enables a high-stroke muscle, a parallel arrangement enables an antagonistic, contracting muscle pair, and arranging the same modules radially enables a robot that can locomote by rolling. To enable HEXEL modules to disconnect from bulky high-voltage amplifiers, we also introduce a compact, battery-powered driving electronics module that can snap onto HEXEL modules and enable their untethered operation.
Video
Members





Publications