Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
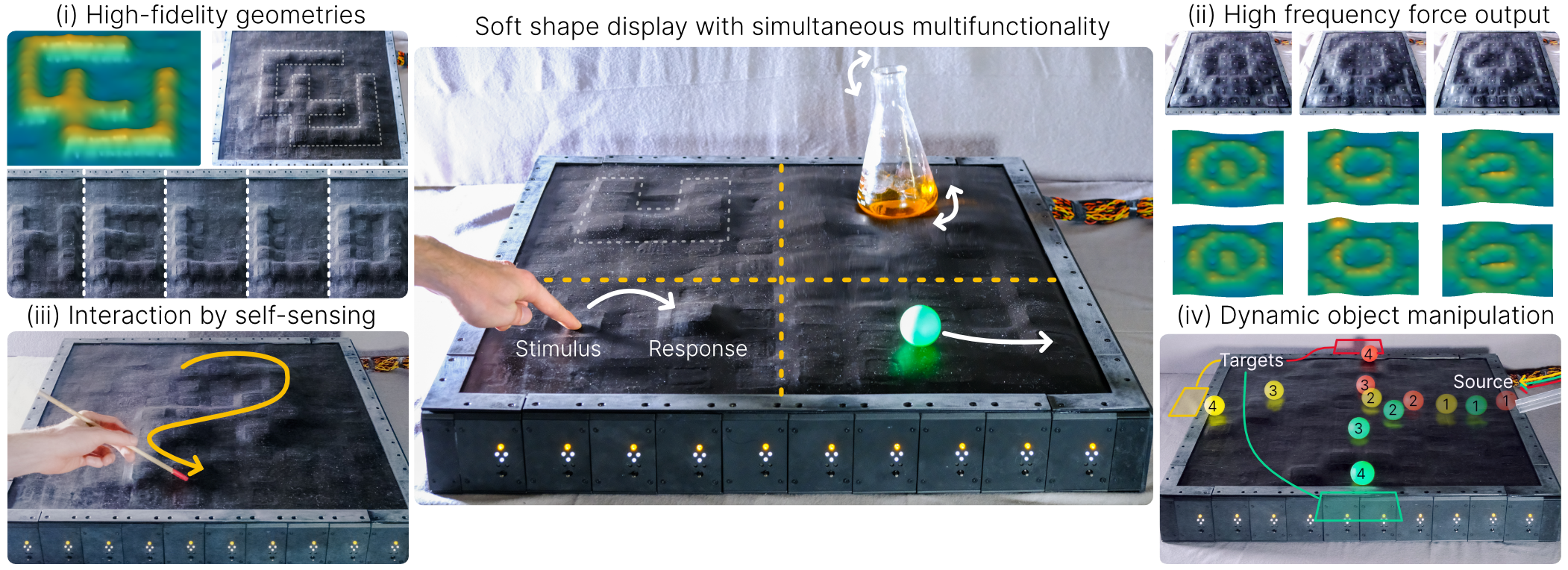
Brian Johnson, Christoph Keplinger et. al., Nature Communications, 2023 []
Shape displays and shape morphing surfaces are devices which can generate surface geometries through actuation, and have already demonstrated a wide variety of applications in haptic interaction, visual information display, and object manipulation. Yet existing shape displays suffer limitations related to the elasticity of the surface, the ability to display high-fidelity geometries, low shape-morphing speed, and a lack of internal sensing.
We addressed these limitations in this project, by creating a new form of soft robotic shape display built from a repeatable 1x1 “cell” that integrates HASEL (hydraulically-amplified self-healing electrostatic) actuation, magnetic deformation sensing, and a feedback control circuit. Using 100 cells, we created a 10x10 array shape display with a soft elastic surface skin. Each HASEL actuator in the display is capable of up to 50 Hz actuation, while the magnetic sensors can measure surface deformations as small as 0.1 mm and external forces as low as 50 mN. Closed-loop control at 200 Hz allows for high reactivity. In comparison to existing technology, which typically use thermal or pneumatic actuation to control shape morphing, the integration of HASEL actuators allows the display to remain very quiet (below 8 dB above ambient levels) while generating little heat.
Our work shows that through the tight integration of soft actuators and sensors in large numbers, coupled with global control strategies, new capabilities and functionalities can be achieved while maintaining high performance both of each individual element and of the entire shape display.
Video
Members


Publications