Bioinspired and wearable robotics
A soft, fast and versatile electrohydraulic gripper with capacitive object size detection
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Liquid Crystal Elastomers with Enhanced Directional Actuation to Electric Fields
Philipp Rothemund, Christoph Keplinger et. al., Advanced Materials, 2021 []
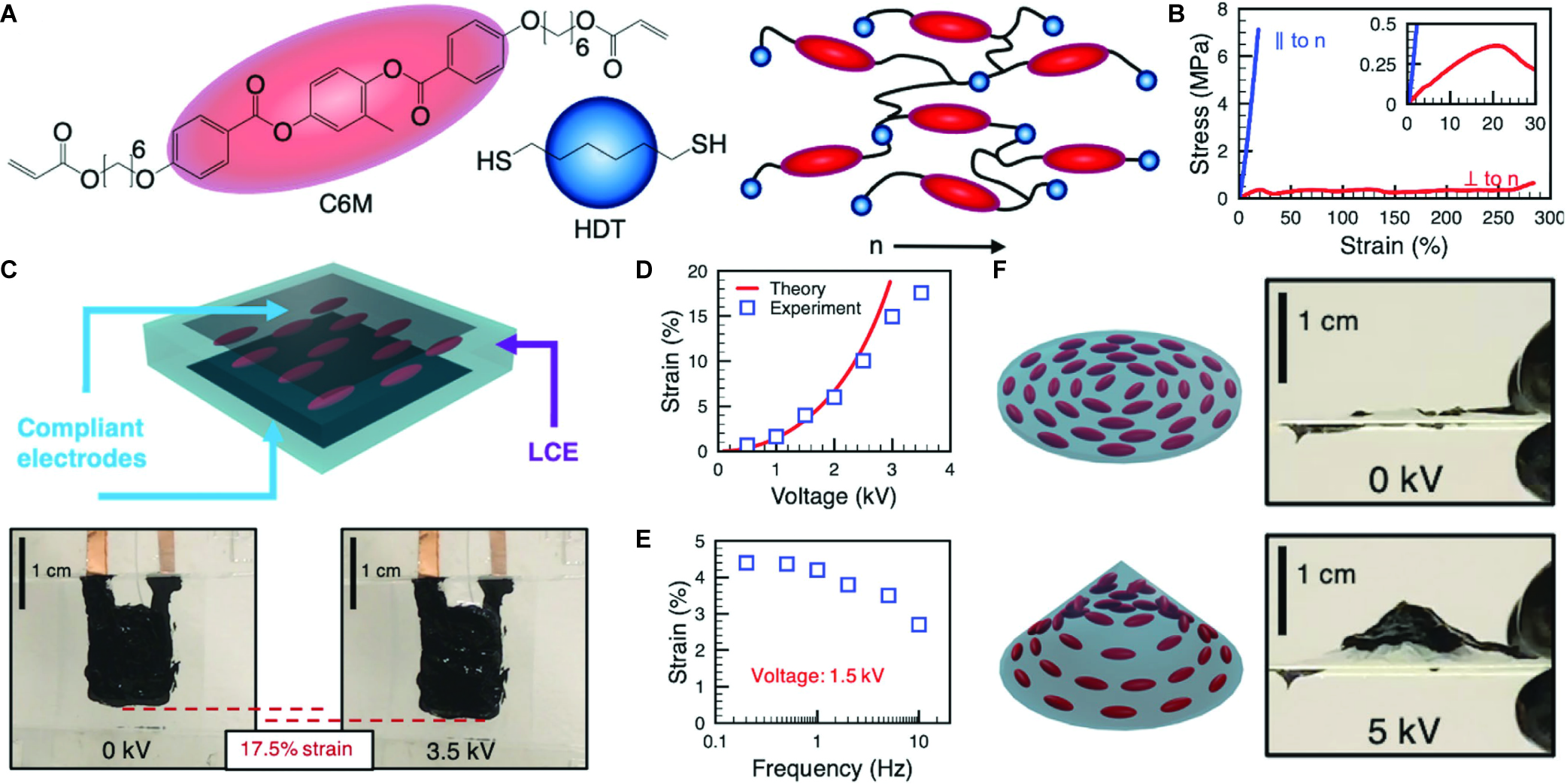
Dielectric elastomer actuators are a class of soft actuators, which consist of compliant, elastomeric membranes and are coated on both sides with compliant electrodes. When a voltage is applied between the electrodes, a Maxwell stress arises, which leads to a reduction in thickness and an in-plane expansion of the membrane. The in-plane expansion is equal in all directions due to the isotropy of the material. To achieve directional actuation, dielectric elastomer actuators are therefore typically prestretched laterally and attached to rigid frames.
In this project [![]() ], we developed a liquid crystal elastomer for dielectric elastomer actuators with directional actuation. The material was synthesized by crosslinking the monomer 1,6-hexanedithiol with the liquid crystalline monomer 1,4-bis-[4-(6-acryloyloxy-hexyloxy)benzoyloxy]- 2-methylbenzene. Parallel alignment of the liquid crystals leads to a stiffness ratio of 14:1 between the directions parallel and perpendicular to the alignment direction. In a dielectric elastomer actuator, this large anisotropy in stiffness, leads to uniaxial actuation without the need for a prestretch or a rigid frame.
], we developed a liquid crystal elastomer for dielectric elastomer actuators with directional actuation. The material was synthesized by crosslinking the monomer 1,6-hexanedithiol with the liquid crystalline monomer 1,4-bis-[4-(6-acryloyloxy-hexyloxy)benzoyloxy]- 2-methylbenzene. Parallel alignment of the liquid crystals leads to a stiffness ratio of 14:1 between the directions parallel and perpendicular to the alignment direction. In a dielectric elastomer actuator, this large anisotropy in stiffness, leads to uniaxial actuation without the need for a prestretch or a rigid frame.
With actuation strains of 20% at 6 kV, strain rates of 18%/s, and demonstrated actuation frequencies up to 10 Hz, the liquid crystal elastomer exhibited substantially improved electromechanical performance compared to previously reported dielectric elastomer actuators based on liquid crystals.
The alignment of liquid crystals can be patterned across the elastomer to achieve different types of deformation. Circular alignment of the liquid crystals leads to an out-of-plane deformation of the initially flat membrane into a cone. We demonstrated an array of three individually addressable out-of-plane actuators on a single membrane.
This work demonstrated the potential for liquid crystal elastomers in dielectric elastomer actuators that feature complex, programable three-dimensional deformation.
Members


Publications