Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
MRI-powered wireless medical millirobots
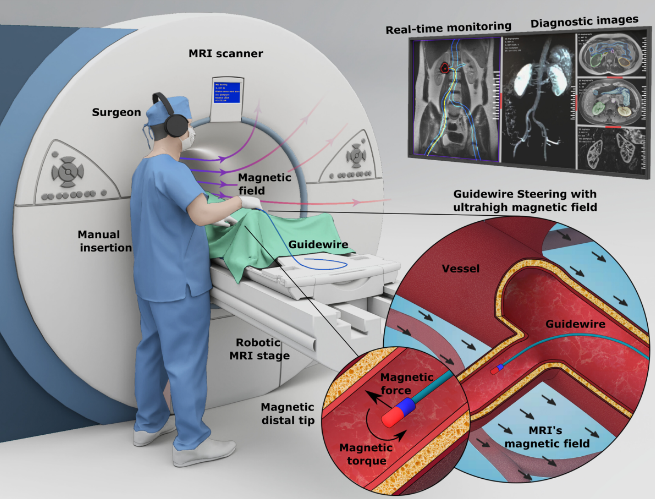
Among many medical imaging modalities, magnetic resonance imaging (MRI) at-tracts the most attention with superior image contrast, unlimited imaging depth, and ionizing radiation-free nature. MRI is considered the gold standard in manydiagnostic applications, such as brain tumor and stroke diagnosis, and has alreadyproven itself in guiding medical tools, such as biopsy needles and focus ultra-sound. Besides its high-quality medical imaging, MRI scanners are human-sized electromagnetic systems that could be used for magnetic actuation purposes, whichmakes them a perfect candidate for a combined imaging and actuation platform formagnetic microrobots. Our research focus on developing novel magnetic actuation, MR imaging/sensing methods for medical microrobotic systems.
We have developed various wireless milli- and microrobots powered and tracked using an our 7 Tesla (7T) small-animal MRI scanner. We focused on three main approaches to use MRI’s hardware to actuate wireless robotic systems: magnetic gradient force-based 3D pulling, Ultrahigh field magnetic actuation and Lorentz force-based rotation. Moreover, we also developed fast MRI methods for tracking magnetic robots, deep learning-based microrobot tracking algorithms and localization approaches for micron-scale microrobot aggregates. Later, we combine magnetic microrobots with focus ultrasound system to develop microrobotic on-demand drug delivery. Finally, we investigate new MRI sensing modalities for remote temperature sensing and nanodiamond-based novel contrast agents for microrobotic system in MR images.
Members






Publications