Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Parallel microcracks-based ultrasensitive and highly stretchable strain sensors
Flexible electronic devices are a rising interest in both research and industry due to their facile interaction with the human body and surrounding environment. In particular, demand is dramatically increasing for flexible sensors due to their potential applications in personalized health monitoring, human-machine interfaces, and soft robotics. Examples of such electronic devices include sensors for strain, pressure, touch, temperature, and a variety of bio-sensors.
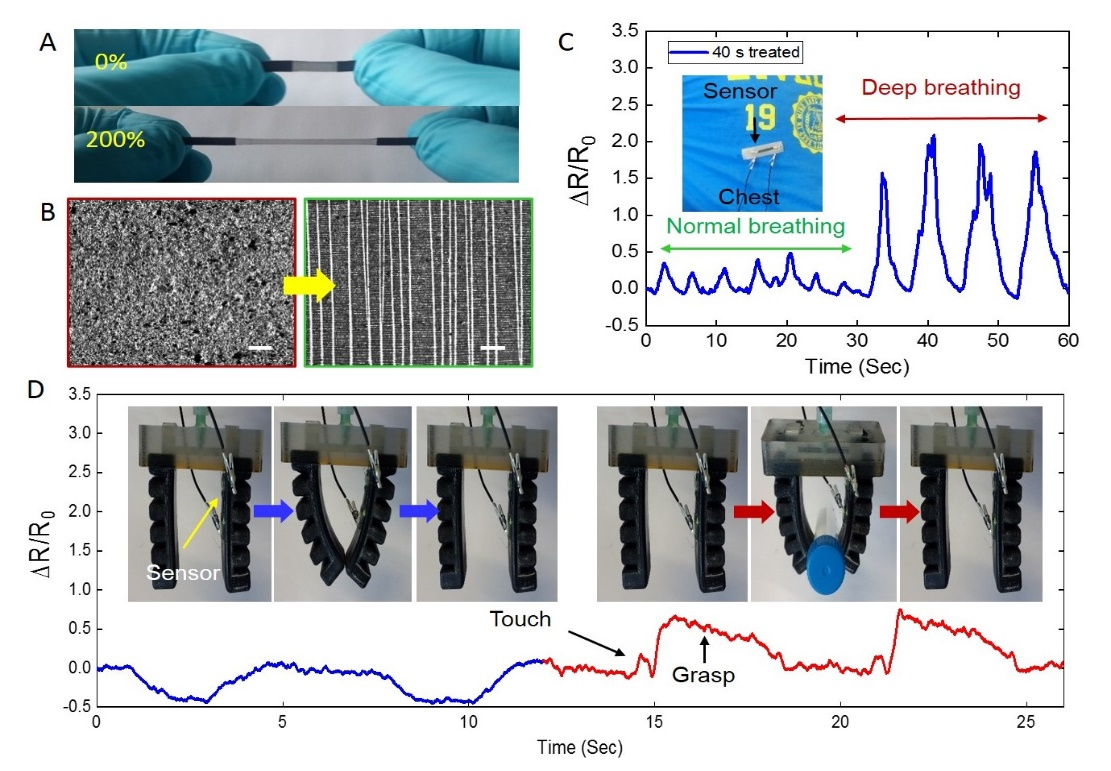
In this project, we have developed highly stretchable strain sensors by combining graphite thin films as strain responsive conductive films and a flexible polymer support (Figure a). To boost the sensitivity, controllable microcracks have been generated in graphite films that can dramatically reduce the conductive passways upon stretching (Figure b). As a result, the strain sensors can simultaneously detect deformation amplitudes ranging from microscale ($\geq$ 10 $\mu$m) to millimeter scale ($\geq$ 10 mm) with ultrasensitivity (GFs $\geq$ 100) and high stretchability (e $\geq$ 100).
We have demonstrated the advantages of our strain sensors in various potential applications such as human motion detection, sound visualization, pressure sensing, and soft robotics. Figure (c) shows the resistance change of a strain sensor mounted onto the chest area for respiration rate and pattern monitoring. As shown, there is an obvious resistance change during deep breathing since larger strain is accommodated by the sensor. Figure (d) illustrates the integration of our strain sensors with a soft gripper robot as feedback control and sensory skin. The integration enabled touch and grasp sensing through resistance change of the embedded sensors.
Members

Publications