Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Microrobot collectives with reconfigurable morphologies and functions
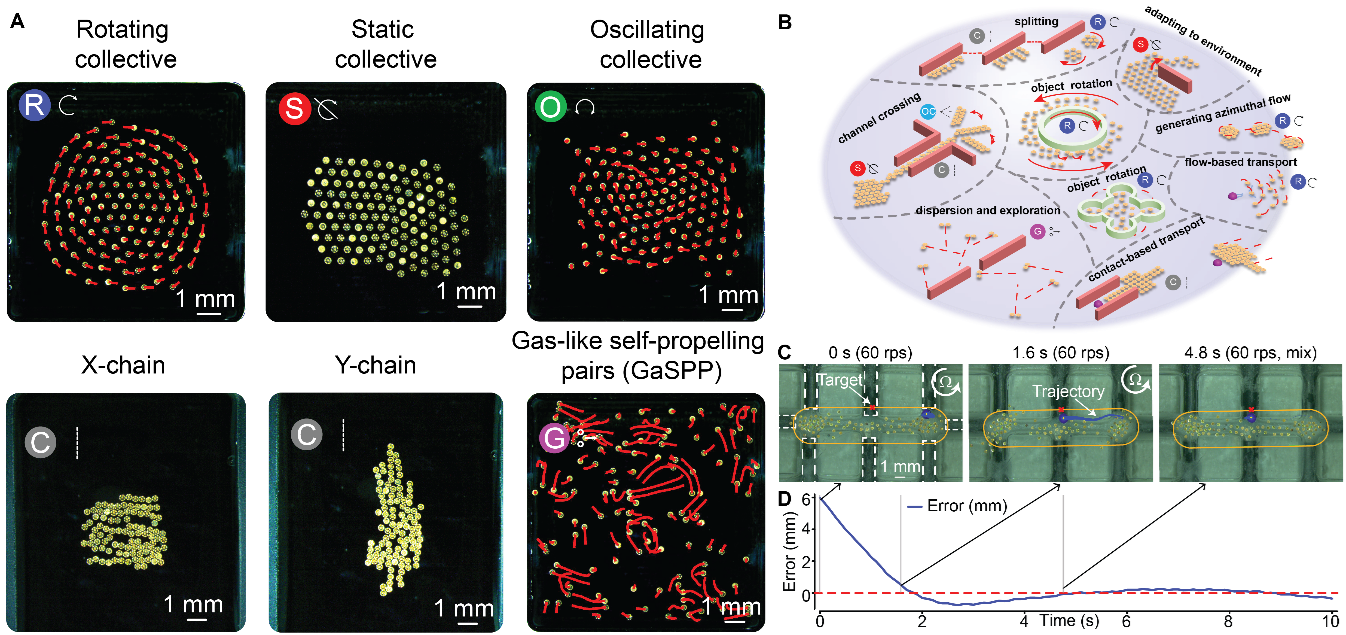
Dynamic systems constantly consume energy to maintain their spatiotemporal structures and programmable self-assembly translates information from individual parts to the collective whole. Combining these two in a single system can be useful for both fundamental and robotics applications and it is challenging because of the difficulty in finding suitable interactions that are both dissipative and programmable. We developed an experimental platform of magnetic microrobots that utilize programmable physical interactions between magnetic micro-disks to generate their dynamic self-organization. Our system acts as a versatile microrobotic collective system capable of on-demand reconfiguration to adapt to and utilize its environment to perform various robotic functions at the air-water interface[![]() ]. The relative dominance of the pairwise physical interactions between the microrobots can be tuned using a global magnetic field. Our system exhibits diverse modes ranging from isotropic to anisotrpic behaviors and transitions between a globally driven and a novel self-propelling behavior. We demonstrated various functions using the reconfigurability of our system to navigate, explore, and interact with the environment. We also developed strategies for autonomous control and transport of passive structures using the fluid flows generated by the microrobot collectives[
]. The relative dominance of the pairwise physical interactions between the microrobots can be tuned using a global magnetic field. Our system exhibits diverse modes ranging from isotropic to anisotrpic behaviors and transitions between a globally driven and a novel self-propelling behavior. We demonstrated various functions using the reconfigurability of our system to navigate, explore, and interact with the environment. We also developed strategies for autonomous control and transport of passive structures using the fluid flows generated by the microrobot collectives[![]() ]. Such versatile microrobot collectives with globally driven and self-propelled behaviors have great potential in future medical and environmental applications.
]. Such versatile microrobot collectives with globally driven and self-propelled behaviors have great potential in future medical and environmental applications.
Video
Members

Publications