Finding optimal feedback controllers for nonlinear dynamic systems from data
is hard. Recently, Bayesian optimization (BO) has been proposed as a powerful
framework for direct controller tuning from experimental trials. For selecting
the next query point and finding the global optimum, BO relies on a
probabilistic description of the latent objective function, typically a
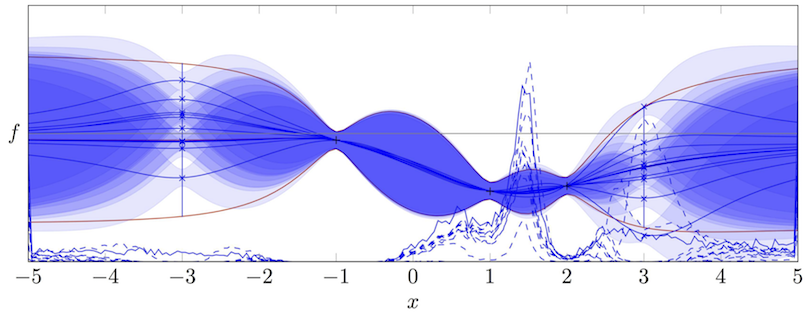
Gaussian process (GP). As is shown herein, GPs with a common kernel choice can,
however, lead to poor learning outcomes on standard quadratic control problems.
For a first-order system, we construct two kernels that specifically leverage
the structure of the well-known Linear Quadratic Regulator (LQR), yet retain
the flexibility of Bayesian nonparametric learning. Simulations of uncertain
linear and nonlinear systems demonstrate that the LQR kernels yield superior
learning performance.
This paper proposes an automatic controller tuning framework based on linear optimal control combined with Bayesian optimization. With this framework, an initial set of controller gains is automatically improved according to a pre-defined performance objective evaluated from experimental data. The underlying Bayesian optimization algorithm is Entropy Search, which represents the latent objective as a Gaussian process and constructs an explicit belief over the location of the objective minimum. This is used to maximize the information gain from each experimental evaluation. Thus, this framework shall yield improved controllers with fewer evaluations compared to alternative approaches. A seven-degree- of-freedom robot arm balancing an inverted pole is used as the experimental demonstrator. Results of a two- and four- dimensional tuning problems highlight the method’s potential for automatic controller tuning on robotic platforms.
This paper proposes an automatic controller tuning framework based on linear optimal control combined with Bayesian optimization. With this framework, an initial set of controller gains is automatically improved according to a pre-defined performance objective evaluated from experimental data. The underlying Bayesian optimization algorithm is Entropy Search, which represents the latent objective as a Gaussian process and constructs an explicit belief over the location of the objective minimum. This is used to maximize the information gain from each experimental evaluation. Thus, this framework shall yield improved controllers with fewer evaluations compared to alternative approaches. A seven-degree-of-freedom robot arm balancing an inverted pole is used as the experimental demonstrator. Preliminary results of a low-dimensional tuning problem highlight the method’s potential for automatic controller tuning on robotic platforms.
Contemporary global optimization algorithms are based on local measures of utility, rather than a probability measure over location and value of the optimum. They thus attempt to collect low function values, not to learn about the optimum. The reason for the absence of probabilistic global optimizers is that the corresponding inference problem is intractable in several ways. This paper develops desiderata for probabilistic optimization algorithms, then presents a concrete algorithm which addresses each of the computational intractabilities with a sequence of approximations and explicitly adresses the decision problem of maximizing information gain from each evaluation.