The project is funded within the German Research Foundation (DFG) Priority Program on "Cyber-physical Networking" (SPP 1914, joint grant to Dr. Trimpe and Dr. Zimmerling). More information on the Priority Program can be found here.
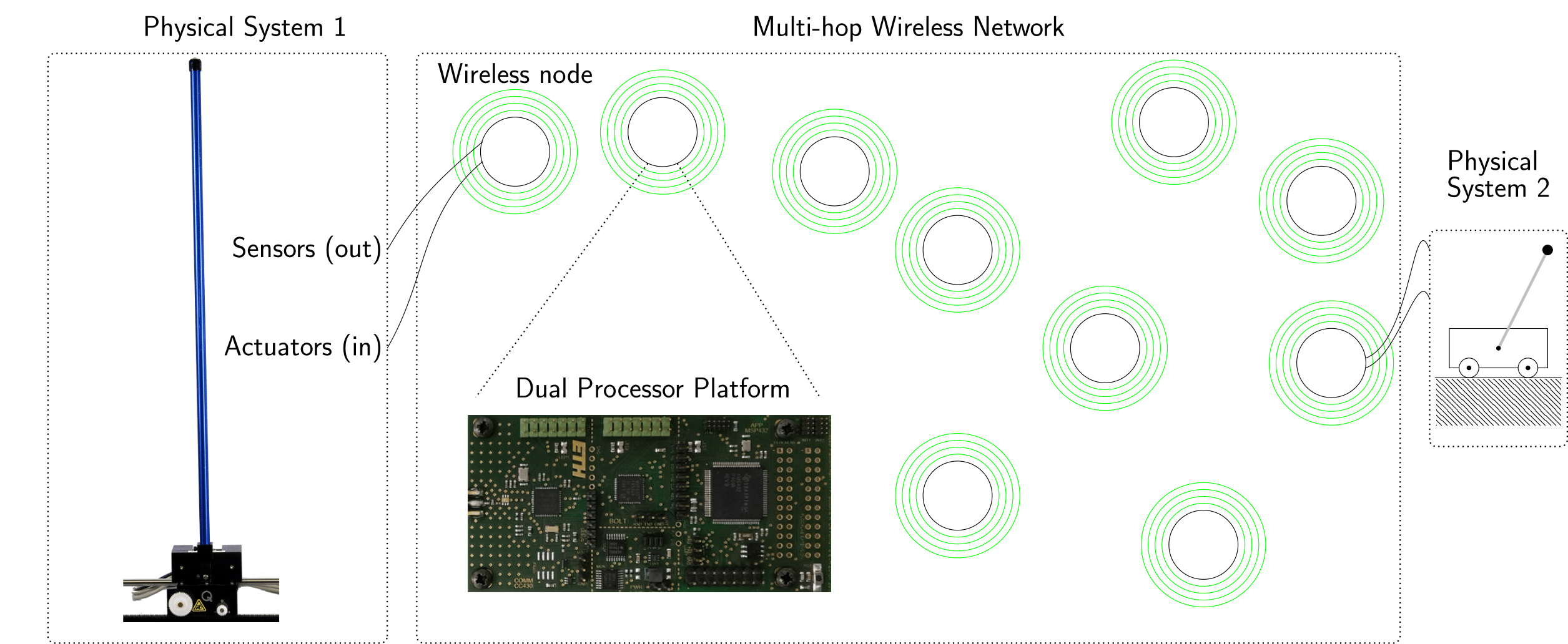
Closing feedback loops fast and over long distances is key to emerging applications; for example, robot motion control and swarm coordination require update intervals below 100 ms. Low-power wireless is preferred for its flexibility, low cost, and small form factor, especially if the devices support multi-hop communication. Thus far, however, closed-loop control over multi-hop low-power wireless has only been demonstrated for update intervals on the order of multiple seconds. This paper presents a wireless embedded system that tames imperfections impairing control performance such as jitter or packet loss, and a control design that exploits the essential properties of this system to provably guarantee closed-loop stability for linear dynamic systems. Using experiments on a testbed with multiple cart-pole systems, we are the first to demonstrate the feasibility and to assess the performance of closed-loop control and coordination over multi-hop low-power wireless for update intervals from 20 ms to 50 ms.
An event-based state estimation approach for reducing communication in a networked control system is proposed. Multiple distributed sensor agents observe a dynamic process and sporadically transmit their measurements to estimator agents over a shared bus network. Local event-triggering protocols ensure that data is transmitted only when necessary to meet a desired estimation accuracy. The event-based design is shown to emulate the performance of a centralised state observer design up to guaranteed bounds, but with reduced communication. The stability results for state estimation are extended to the distributed control system that results when the local estimates are used for feedback control. Results from numerical simulations and hardware experiments illustrate the effectiveness of the proposed approach in reducing network communication.