Perceiving Systems
Conference Paper
2016
Reconstructing Articulated Rigged Models from RGB-D Videos
pdf suppl Project's Website YouTube

Perceiving Systems
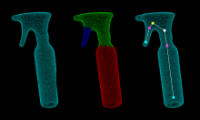
Although commercial and open-source software exist to reconstruct a static object from a sequence recorded with an RGB-D sensor, there is a lack of tools that build rigged models of articulated objects that deform realistically and can be used for tracking or animation. In this work, we fill this gap and propose a method that creates a fully rigged model of an articulated object from depth data of a single sensor. To this end, we combine deformable mesh tracking, motion segmentation based on spectral clustering and skeletonization based on mean curvature flow. The fully rigged model then consists of a watertight mesh, embedded skeleton, and skinning weights.
| Author(s): | Dimitrios Tzionas and Juergen Gall |
| Links: | |
| Book Title: | European Conference on Computer Vision Workshops 2016 (ECCVW’16) - Workshop on Recovering 6D Object Pose (R6D’16) |
| Pages: | 620--633 |
| Year: | 2016 |
| Publisher: | Springer International Publishing |
| Project(s): | |
| BibTeX Type: | Conference Paper (inproceedings) |
| DOI: | 10.1007/978-3-319-49409-8_53 |
| URL: | http://files.is.tue.mpg.de/dtzionas/Skeleton-Reconstruction |
| Electronic Archiving: | grant_archive |
BibTeX
@inproceedings{Tzionas:ECCVw:2016,
title = {Reconstructing Articulated Rigged Models from RGB-D Videos},
booktitle = {European Conference on Computer Vision Workshops 2016 (ECCVW'16) - Workshop on Recovering 6D Object Pose (R6D'16)},
abstract = {Although commercial and open-source software exist to reconstruct a static object from a sequence recorded with an RGB-D sensor, there is a lack of tools that build rigged models of articulated objects that deform realistically and can be used for tracking or animation.
In this work, we fill this gap and propose a method that creates a fully rigged model of an articulated object from depth data of a single sensor.
To this end, we combine deformable mesh tracking, motion segmentation based on spectral clustering and skeletonization based on mean curvature flow.
The fully rigged model then consists of a watertight mesh, embedded skeleton, and skinning weights.},
pages = {620--633},
publisher = {Springer International Publishing},
year = {2016},
author = {Tzionas, Dimitrios and Gall, Juergen},
doi = {10.1007/978-3-319-49409-8_53},
url = {http://files.is.tue.mpg.de/dtzionas/Skeleton-Reconstruction}
}