D-Grasp: Physically Plausible Dynamic Grasp Synthesis for Hand-Object Interactions
paper project video code
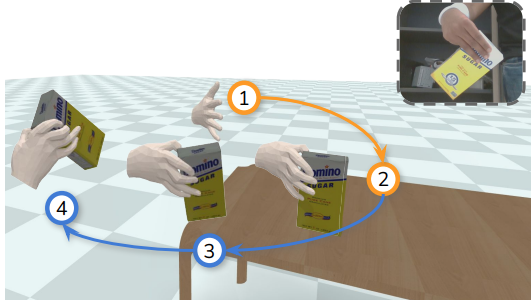
We introduce the dynamic grasp synthesis task: given an object with a known 6D pose and a grasp reference, our goal is to generate motions that move the object to a target 6D pose. This is challenging, because it requires reasoning about the complex articulation of the human hand and the intricate physical interaction with the object. We propose a novel method that frames this problem in the reinforcement learning framework and leverages a physics simulation, both to learn and to evaluate such dynamic interactions. A hierarchical approach decomposes the task into low-level grasping and high-level motion synthesis. It can be used to generate novel hand sequences that approach, grasp, and move an object to a desired location, while retaining human-likeness. We show that our approach leads to stable grasps and generates a wide range of motions. Furthermore, even imperfect labels can be corrected by our method to generate dynamic interaction sequences.
| Author(s): | Christen, Sammy and Kocabas, Muhammed and Aksan, Emre and Hwangbo, Jemin and Song, Jie and Hilliges, Otmar |
| Links: | |
| Book Title: | 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022) |
| Pages: | 20545--20554 |
| Year: | 2022 |
| Month: | June |
| Publisher: | IEEE |
| BibTeX Type: | Conference Paper (inproceedings) |
| Address: | Piscataway, NJ |
| DOI: | 10.1109/CVPR52688.2022.01992 |
| Event Name: | IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022) |
| Event Place: | New Orleans, Louisiana |
| State: | Published |
| Electronic Archiving: | grant_archive |
| ISBN: | 978-1-6654-6947-0 |
BibTeX
@inproceedings{Christen:CVPR:2022,
title = {{D-Grasp}: Physically Plausible Dynamic Grasp Synthesis for Hand-Object Interactions},
booktitle = {2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022)},
abstract = {We introduce the dynamic grasp synthesis task: given an object with a known 6D pose and a grasp reference, our goal is to generate motions that move the object to a target 6D pose. This is challenging, because it requires reasoning about the complex articulation of the human hand and the intricate physical interaction with the object. We propose a novel method that frames this problem in the reinforcement learning framework and leverages a physics simulation, both to learn and to evaluate such dynamic interactions. A hierarchical approach decomposes the task into low-level grasping and high-level motion synthesis. It can be used to generate novel hand sequences that approach, grasp, and move an object to a desired location, while retaining human-likeness. We show that our approach leads to stable grasps and generates a wide range of motions. Furthermore, even imperfect labels can be corrected by our method to generate dynamic interaction sequences.},
pages = {20545--20554},
publisher = {IEEE},
address = {Piscataway, NJ},
month = jun,
year = {2022},
author = {Christen, Sammy and Kocabas, Muhammed and Aksan, Emre and Hwangbo, Jemin and Song, Jie and Hilliges, Otmar},
doi = {10.1109/CVPR52688.2022.01992},
month_numeric = {6}
}