Physical Intelligence
Article
2023
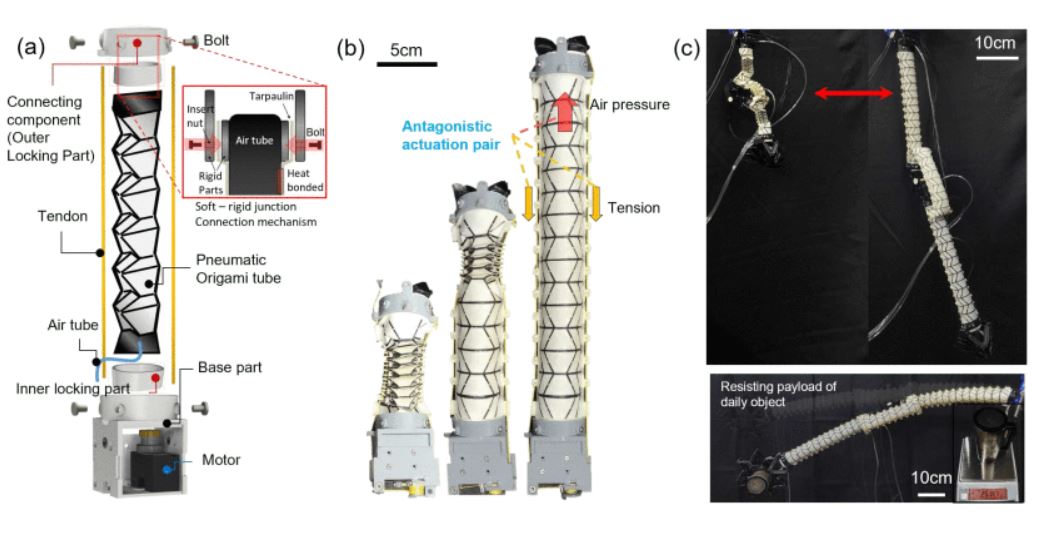
Deployable Soft Origami Modular Robotic Arm With Variable Stiffness Using Facet Buckling

Physical Intelligence
| Author(s): | Park, MinJo and Kim, Woongbae and Yu, Sung-Yol and Cho, Jungmin and Kang, Wonkyeong and Byun, Junghwan and Jeong, Useok and Cho, Kyu-Jin |
| Journal: | IEEE Robotics and Automation Letters |
| Volume: | 8 |
| Number (issue): | 2 |
| Pages: | 864--871 |
| Year: | 2023 |
| BibTeX Type: | Article (article) |
| DOI: | 10.1109/LRA.2022.3232267 |
| State: | Published |
| Electronic Archiving: | grant_archive |
BibTeX
@article{park2022deployable,
title = {Deployable Soft Origami Modular Robotic Arm With Variable Stiffness Using Facet Buckling},
journal = {IEEE Robotics and Automation Letters},
volume = {8},
number = {2},
pages = {864--871},
year = {2023},
author = {Park, MinJo and Kim, Woongbae and Yu, Sung-Yol and Cho, Jungmin and Kang, Wonkyeong and Byun, Junghwan and Jeong, Useok and Cho, Kyu-Jin},
doi = {10.1109/LRA.2022.3232267}
}