Physical Intelligence
Bioinspired Autonomous Miniature Robots
Patent
2020
Method of actuating a shape changeable member, shape changeable member and actuating system


Physical Intelligence
Assistant Professor at Nanyang Technological University, Singapore

Physical Intelligence
Associate Professor (Tenured) at Delft University of Technology, Netherlands
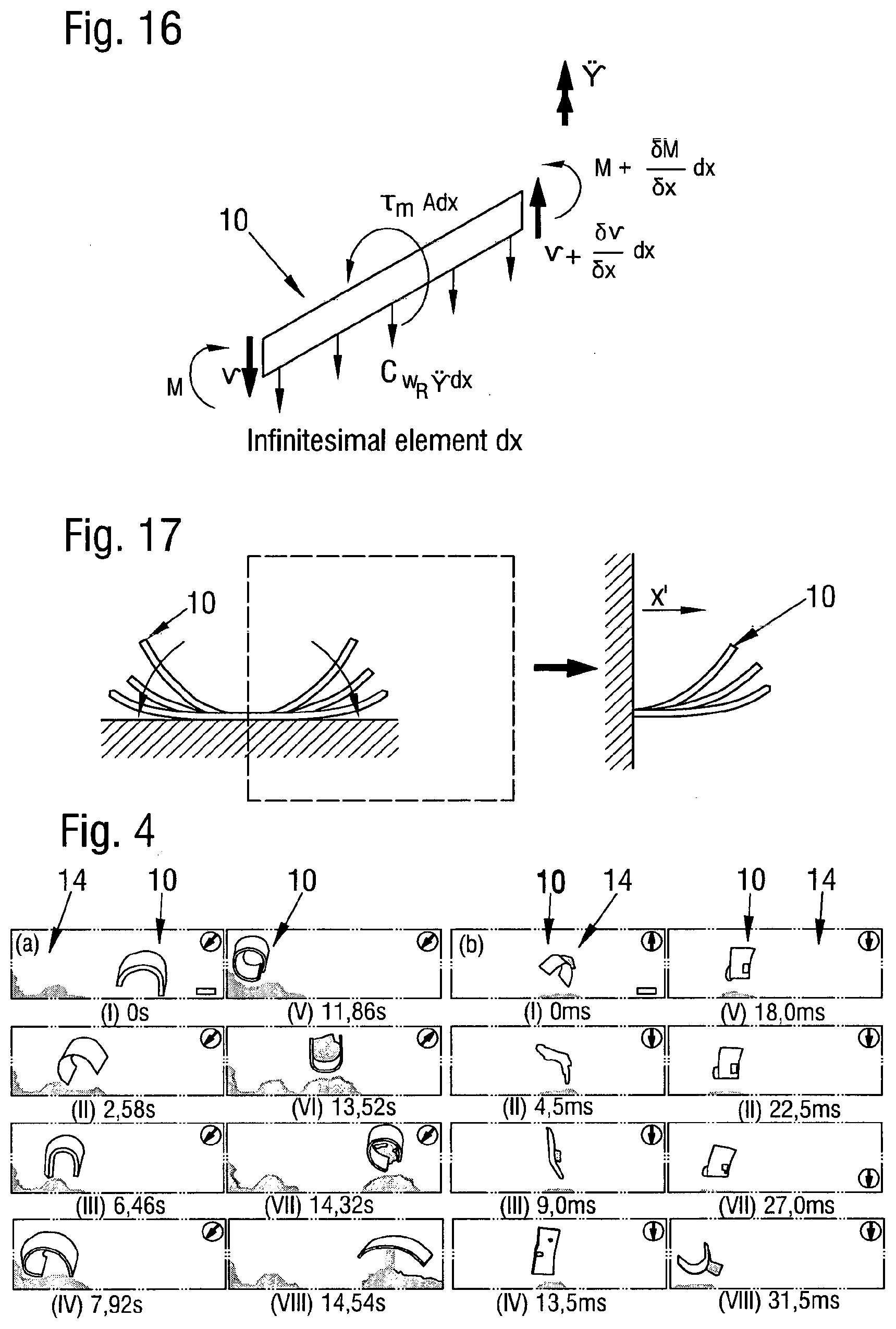
The present invention relates to a method of actuating a shape changeable member of actuatable material. The invention further relates to a shape changeable member and to a system comprising such a shape changeable member and a magnetic field apparatus.
| Author(s): | Hu, Wenqi and Lum, Guo Zhan and Mastrangeli, Massimo and Sitti, Metin |
| Year: | 2020 |
| Month: | January |
| Publisher: | Google Patents |
| BibTeX Type: | Patent (patent) |
| Electronic Archiving: | grant_archive |
| Note: | US Patent App. 16/477,593 |
BibTeX
@patent{hu2020method,
title = {Method of actuating a shape changeable member, shape changeable member and actuating system},
abstract = {The present invention relates to a method of actuating a shape changeable member of actuatable material. The invention further relates to a shape changeable member and to a system comprising such a shape changeable member and a magnetic field apparatus.},
publisher = {Google Patents},
month = jan,
year = {2020},
note = {US Patent App. 16/477,593},
author = {Hu, Wenqi and Lum, Guo Zhan and Mastrangeli, Massimo and Sitti, Metin},
month_numeric = {1}
}