Open-source legged robots
We firmly believe in sharing scientific methods and materials; this includes open-sourcing our blueprints for ease of reproduction and continuous development.
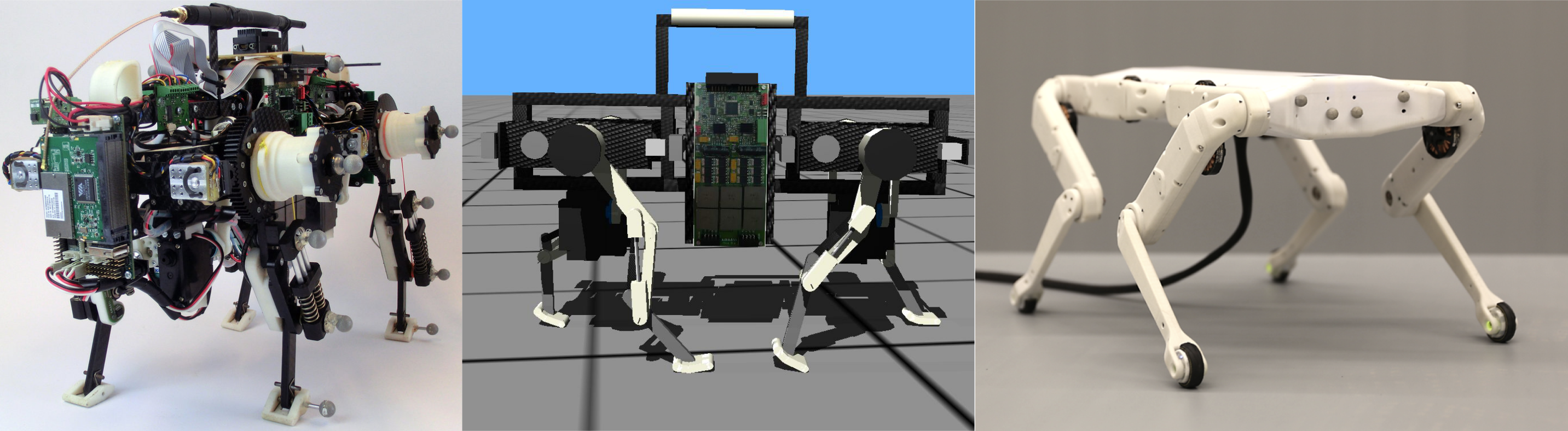
We actively contribute to two open-source projects; the Oncilla robot (https://c4science.ch/tag/oncilla/), and the Solo quadruped robot as part of the Open Dynamic Robot Initiative (https://open-dynamic-robot-initiative.github.io/). You can find blueprints of both robots' mechanics, electronics, and control online.
Oncilla and Solo robots differ fundamentally; Oncilla robot's legs feature strong natural dynamics produced by a set of springs, which make the robot's leg joints underactuated. Mechanical elasticity is especially beneficial when sensor information is sparse or unavailable, or when locomotion control is limited by bandwidth and computation. In case of a locomotion perturbation like a sudden pothole, the leg's mechanical elasticities will capture the robot's mass independently from sensor feedback, sensor delay, a locomotion controller, or planner action.
Solo robot achieves leg compliance through active, impedance control, for example, a virtual compliant leg controller. The robot was designed by Felix Grimminger and developed in a cooperation between the Movement Generation and Control Group (Dr. Ludovic Righetti) and the Dynamic Locomotion Group. The solo robot is a comparably inexpensive quadruped research platform that features state-of-the-art actuation, sensing, and control. The robot can be reproduced by 3d printing and off-the-shelf parts, and no workshop is needed. You can download the Solo robot's blueprints, print the parts, and start assembling!
Video
Members


Publications