Soft substrate locomotion with multi-segmented toes
Adaptive toes, schematic
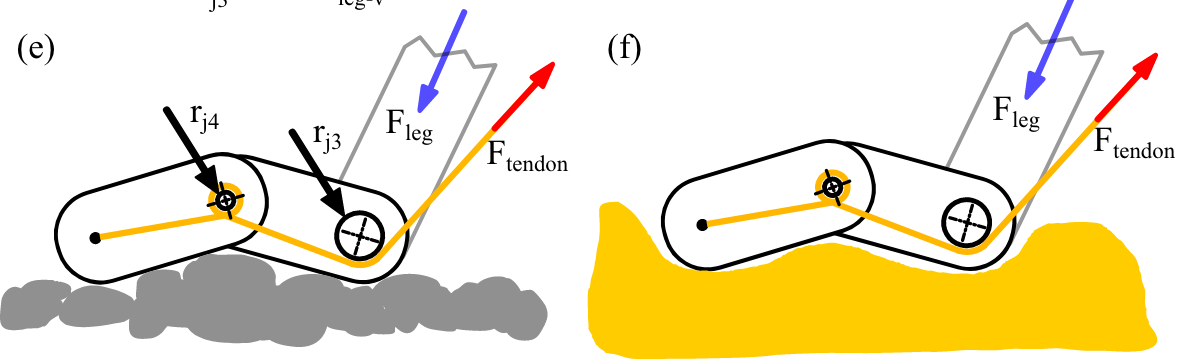
We demonstrate [] a multi-segmented toe design capable of grasping into various soft substrates, such as sand and gravel. The leg's toes are mechanically coupled to leg flexion [], and also grasp into rough terrain.
We demonstrate [] a multi-segmented toe design capable of grasping into various soft substrates, such as sand and gravel. The leg's toes are mechanically coupled to leg flexion [], and also grasp into rough terrain.
Most legged robots are built with leg structures from serially mounted links and actuators and are controlled through complex controllers and sensor feedback. In comparison, animals developed multi-segment legs, mechanical coupling between joints, and multi-segmented feet. They run agile over all terrains, arguably with simpler locomotion control. Here we focus on developing foot mechanisms that resist slipping and sinking also in natural terrain. We present first results of multi-segment feet mounted to a bird-inspired robot leg with multi-joint mechanical tendon coupling. Our one- and two-segment, mechanically adaptive feet show increased viable horizontal forces on multiple soft and hard substrates before starting to slip. We also observe that segmented feet reduce sinking on soft substrates compared to ball-feet and cylinder feet. We report how multi-segmented feet provide a large range of viable centre of pressure points well suited for bipedal robots, but also for quadruped robots on slopes and natural terrain. Our results also offer a functional understanding of segmented feet in animals like ratite birds.
Designers of legged robots are challenged with creating mechanisms that allow energy-efficient locomotion with robust and minimalistic control. Sources of high energy costs in legged robots include the rapid loading and high forces required to support the robot’s mass during stance and the rapid cycling of the leg’s state between stance and swing phases. Here, we demonstrate an avian-inspired robot leg design, BirdBot, that challenges the reliance on rapid feedback control for joint coordination and replaces active control with intrinsic, mechanical coupling, reminiscent of a self-engaging and disengaging clutch. A spring tendon network rapidly switches the leg’s slack segments into a loadable state at touchdown, distributes load among joints, enables rapid disengagement at toe-off through elastically stored energy, and coordinates swing leg flexion. A bistable joint mediates the spring tendon network’s disengagement at the end of stance, powered by stance phase leg angle progression. We show reduced knee-flexing torque to a 10th of what is required for a nonclutching, parallel-elastic leg design with the same kinematics, whereas spring-based compliance extends the leg in stance phase. These mechanisms enable bipedal locomotion with four robot actuators under feedforward control, with high energy efficiency. The robot offers a physical model demonstration of an avian-inspired, multiarticular elastic coupling mechanism that can achieve self-stable, robust, and economic legged locomotion with simple control and no sensory feedback. The proposed design is scalable, allowing the design of large legged robots. BirdBot demonstrates a mechanism for self-engaging and disengaging parallel elastic legs that are contact-triggered by the foot’s own lever-arm action.
 ] a multi-segmented toe design capable of grasping into various soft substrates, such as sand and gravel. The leg's toes are mechanically coupled to leg flexion [
] a multi-segmented toe design capable of grasping into various soft substrates, such as sand and gravel. The leg's toes are mechanically coupled to leg flexion [