Dynamic Locomotion
Video
Publications
Physical damping trading off locomotion characteristics
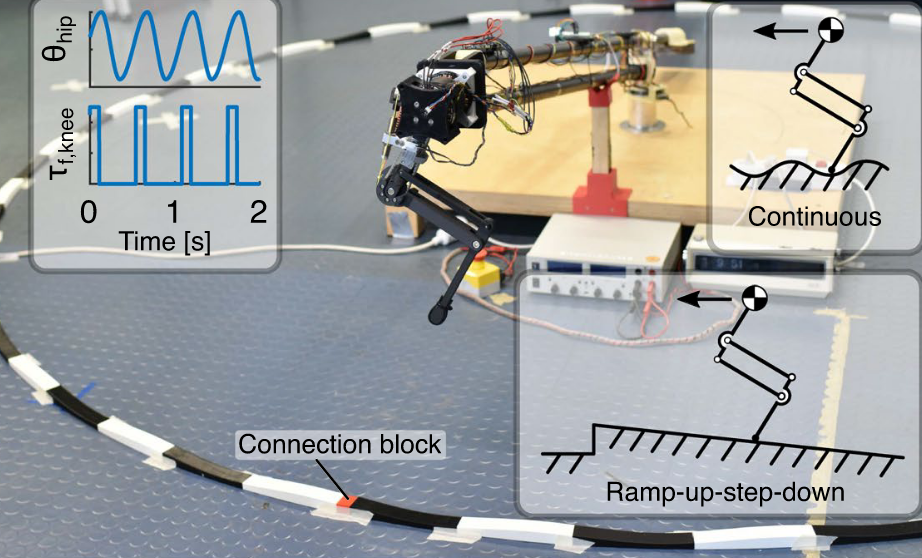
Motivated by the concept of an adaptive mechanism triggering leading to rapid responses in the muscle-tendon architecture of animals [ ], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [].
], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [].
Motivated by the concept of an adaptive mechanism triggering leading to rapid responses in the muscle-tendon architecture of animals [![]() ], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [
], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [![]() ].
].
Video
Publications
Dynamic Locomotion
Article
Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
Mo, A., Izzi, F., Gönen, E. C., Häufle, D., Badri-Spröwitz, A.
Scientific Reports, 13:3290, Nature Publishing Group, February 2023 (Published)
arxiv
Video
Journal URL
CAD and data
DOI
URL
BibTeX
Dynamic Locomotion
Article
Muscle Preflex Response to Perturbations in locomotion: In-vitro experiments and simulations with realistic boundary conditions
Araz, M., Weidner, S., Izzi, F., Badri-Spröwitz, A., Siebert, T., Haeufle, A. D. F. B.
Frontiers in Bioengineering and Biotechnology, 11, 2023 (Published)
DOI
URL
BibTeX