









Die Abteilung „Haptische Intelligenz“ hat es sich zum Ziel gesetzt, haptische Interaktion besser zu verstehen und darauf aufbauend Mensch-Computer- und Mensch-RoboterSysteme zu entwickeln, welche die einzigartigen Fähigkeiten des Tastsinns nutzen. Die Abteilung verfolgt dieses Ziel, indem sie sich auf vier Forschungsbereiche konzentriert:
- das Verständnis des taktilen Kontakts bei physischen Interaktionen von Mensch und Roboter,
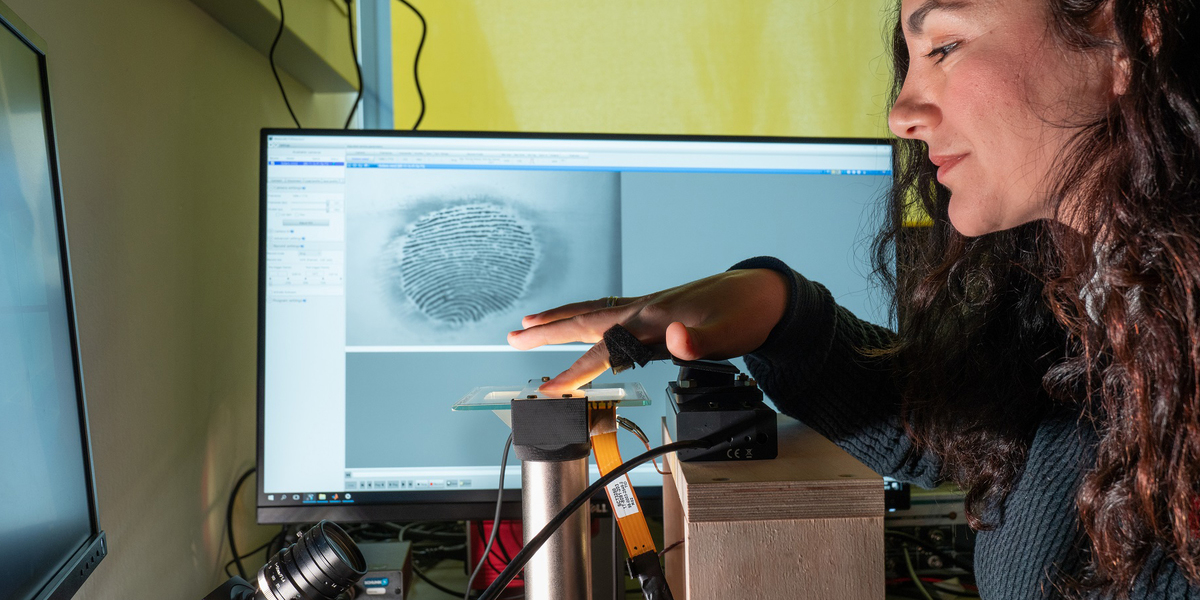
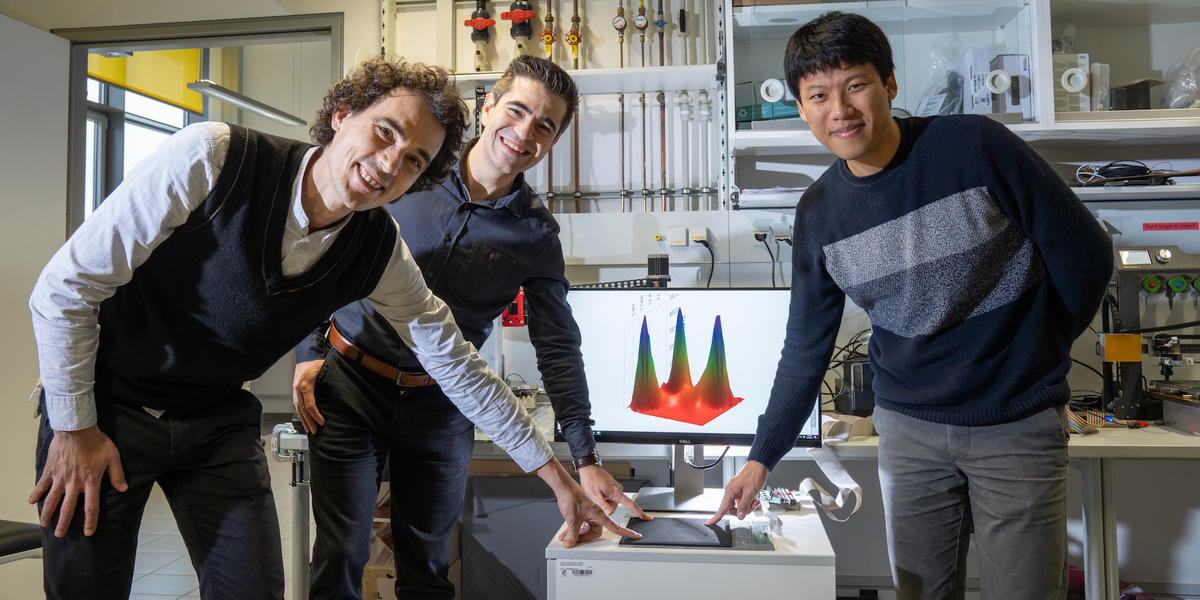
- die Entwicklung und Charakterisierung von haptischer Schnittstellen-Technologie,
- die Weiterentwicklung und Evaluierung von Teleoperationsschnittstellen und
- das Design von Kontakt-basierten Mensch-Roboter-Interaktionssystemen.
Direktor

Katherine J. Kuchenbecker
DirectorAssistenz

Sarah Dressler
- Administrative Staff

Lindsay Nadenau
- Administrative Staff
Highlight Hub

Haptify: A Measurement-Based System for Quantifying the Quality of Haptic Interfaces

Modeling, Fabricating, and Evaluating Synergistic Soft‑Rigid Actuators


Functional Gradients Facilitate Tactile Sensing in Elephant Whiskers
 Science
Science
Open-Source Hardware and Software Platform for Vibrotactile Motion Guidance
 Device
Device
Creating an Affective Robot That Feels Both Touch and Emotion
 IEEE Transactions on Affective Computing
IEEE Transactions on Affective Computing
An Interdisciplinary Approach to Human Pose Estimation: Application to Sign Language

Contact-Aware Refinement of Human Pose Pseudo-Ground Truth via Bioimpedance Sensing


ISyHand: A Dexterous Multi-finger Robot Hand with an Articulated Palm


Towards Robust and Flexible Robot State and Motion Estimation through Optimization and Learning

Socially Aware Computing for Augmenting Virtual Social Interactions



Comparing Puncture-Detection Approaches for Manual Needle Insertions Through the Parietal Pleura
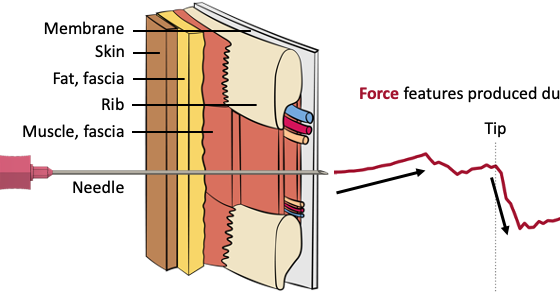 IEEE Transactions on Medical Robotics and Bionics
IEEE Transactions on Medical Robotics and Bionics

Building Instructions You Can Feel: Edge-Changing Haptic Devices for Digitally Guided Construction
 ACM Transactions on Computer-Human Interaction
ACM Transactions on Computer-Human Interaction
Wrist-to-Wrist Bioimpedance Can Reliably Detect Discrete Self-Touch
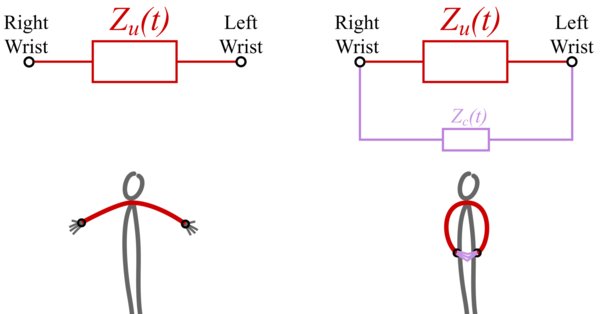 IEEE Transactions on Instrumentation and Measurement
IEEE Transactions on Instrumentation and Measurement
Dexterity and Haptics at the Manipulation and Touch Lab


Electrohydraulic Wearable Devices Create Unprecedented Haptic Sensations

Precision Haptics in Gait Retraining for Knee Osteoarthritis

Data-Driven Needle Puncture Detection for Urgent Medical Care Delivery in Space

Engineering and Evaluating Naturalistic Vibrotactile Feedback for Telerobotic Assembly
