Spider inspired rotary rolling diaphragm actuation
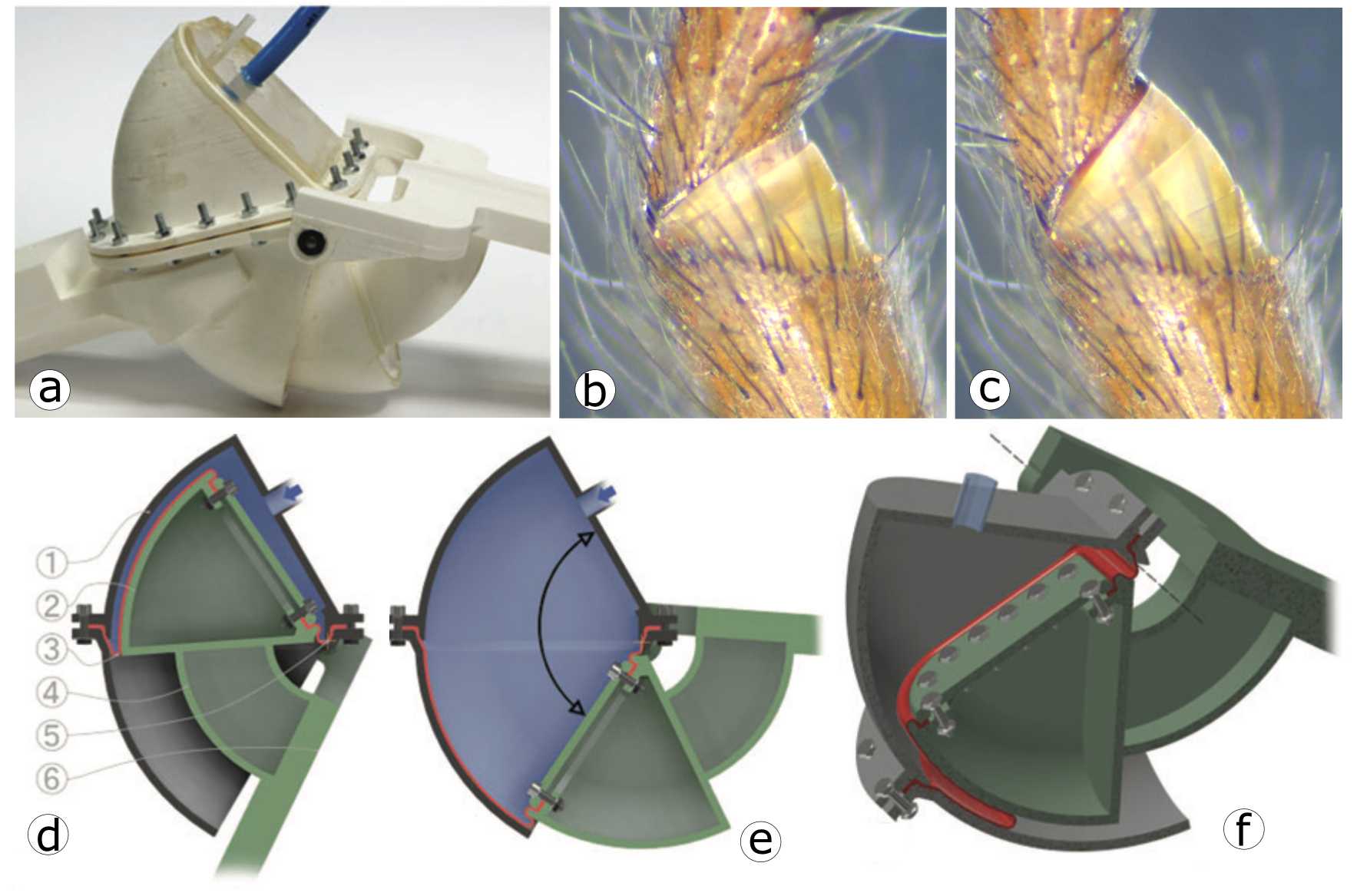
Fluidic actuation evolved in animals and plants. We are fascinated by the membrane structure found in the femur–patella, and tibia–metatarsus joints of spiders [![]() ]. These joints are hypothesized to open hydraulically by pressurized blood (hemolymph). The joint's arthrodial or articular membrane is potentially formed from a single, folded membrane transferring energy from fluid pressure into joint extension torque.
]. These joints are hypothesized to open hydraulically by pressurized blood (hemolymph). The joint's arthrodial or articular membrane is potentially formed from a single, folded membrane transferring energy from fluid pressure into joint extension torque.
Standard engineered fluid actuators typically mount o-rings between moving parts, as friction seals. These actuators work at good efficiency at high pressure. However, at low working pressure or at low speed, the seal's Coulomb friction and stiction are significant, cause inefficient actuation, and require dedicated control. Alternatively, telescopic diaphragm actuators with high efficiency and linear force characteristics exist. Recently, we developed such a system to actuate the ankle of a robot foot {diaphragma2022}. However, telescopic diaphragm actuators have so far limited working range, and allow only a telescopic motion output.
Inspired by the spiders' arthrodial joint membrane, we hypothesized that spiders could utilize a rotary diaphragm-fluid actuator. Our custom-engineered rotary rolling fluidic diaphragm is made from a silicone rubber reinforced fabric with anisotropic tensile characteristics. The three-dimensionally shaped diaphragm follows the actuator’s toroidal shape to unroll smoothly.
The rotary fluidic actuator outputs a constant torque throughout its large stroke. Stiction and Coulomb friction is minimized by design; the rotary diaphragm acting as a seal is rolling throughout the actuator's stroke. The rotary rolling diaphragm actuator is compact and features a low mechanical complexity.
Our implementation outputs 6 Nm torque at a working pressure of 50 kPa, and a working angle range of 100 degrees. The rotary rolling diaphragm shows a 95% mechanical efficiency, compared to seal-type fluidic actuators with an efficiency between 60-90%.
The spider-inspired rotary rolling diaphragm actuator can be used as a compliant actuator in soft robots, or as a stiff transmission device, depending on fluid and working pressure [![]() ].
].
Video
Members


Publications