Hydraulically amplified self-healing electrostatic actuators with muscle-like performance

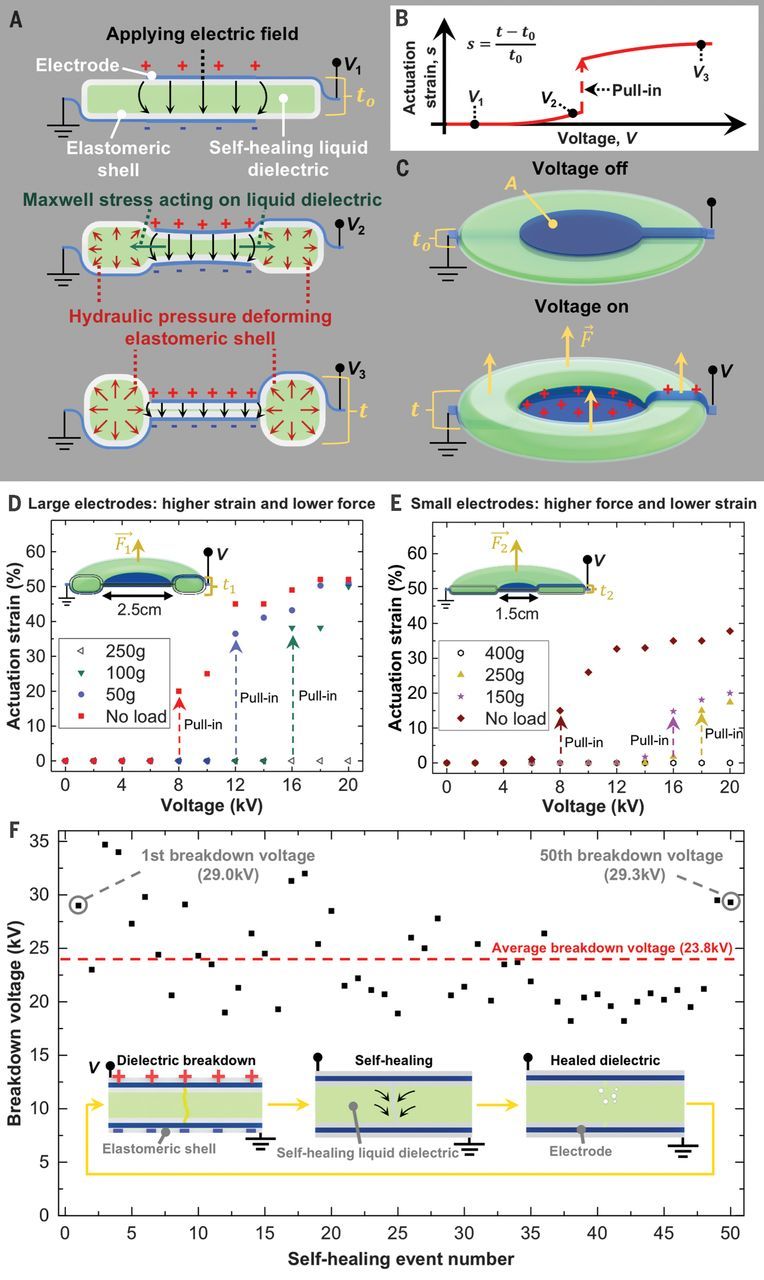
Existing soft actuators have persistent challenges that restrain the potential of soft robotics, highlighting a need for soft transducers that are powerful, high-speed, efficient, and robust. We describe a class of soft actuators, termed hydraulically amplified self-healing electrostatic (HASEL) actuators, which harness a mechanism that couples electrostatic and hydraulic forces to achieve a variety of actuation modes. We introduce prototypical designs of HASEL actuators and demonstrate their robust, muscle-like performance as well as their ability to repeatedly self-heal after dielectric breakdown—all using widely available materials and common fabrication techniques. A soft gripper handling delicate objects and a self-sensing artificial muscle powering a robotic arm illustrate the wide potential of HASEL actuators for next-generation soft robotic devices.
| Author(s): | Eric Acome and Shane K Mitchell and TG Morrissey and MB Emmett and Claire Benjamin and Madeline King and Miles Radakovitz and Christoph Keplinger |
| Journal: | Science |
| Volume: | 359 |
| Number (issue): | 6371 |
| Pages: | 61-65 |
| Year: | 2018 |
| Month: | January |
| Day: | 05 |
| BibTeX Type: | Article (article) |
| DOI: | 10.1126/science.aao6139 |
| State: | Published |
| Electronic Archiving: | grant_archive |
BibTeX
@article{ACOME18-SCI-HASEL,
title = {Hydraulically amplified self-healing electrostatic actuators with muscle-like performance},
journal = {Science},
abstract = {Existing soft actuators have persistent challenges that restrain the potential of soft robotics, highlighting a need for soft transducers that are powerful, high-speed, efficient, and robust. We describe a class of soft actuators, termed hydraulically amplified self-healing electrostatic (HASEL) actuators, which harness a mechanism that couples electrostatic and hydraulic forces to achieve a variety of actuation modes. We introduce prototypical designs of HASEL actuators and demonstrate their robust, muscle-like performance as well as their ability to repeatedly self-heal after dielectric breakdown—all using widely available materials and common fabrication techniques. A soft gripper handling delicate objects and a self-sensing artificial muscle powering a robotic arm illustrate the wide potential of HASEL actuators for next-generation soft robotic devices.},
volume = {359},
number = {6371},
pages = {61-65},
month = jan,
year = {2018},
author = {Acome, Eric and Mitchell, Shane K and Morrissey, TG and Emmett, MB and Benjamin, Claire and King, Madeline and Radakovitz, Miles and Keplinger, Christoph},
doi = {10.1126/science.aao6139},
month_numeric = {1}
}