AirCapRL: Autonomous Aerial Human Motion Capture Using Deep Reinforcement Learning







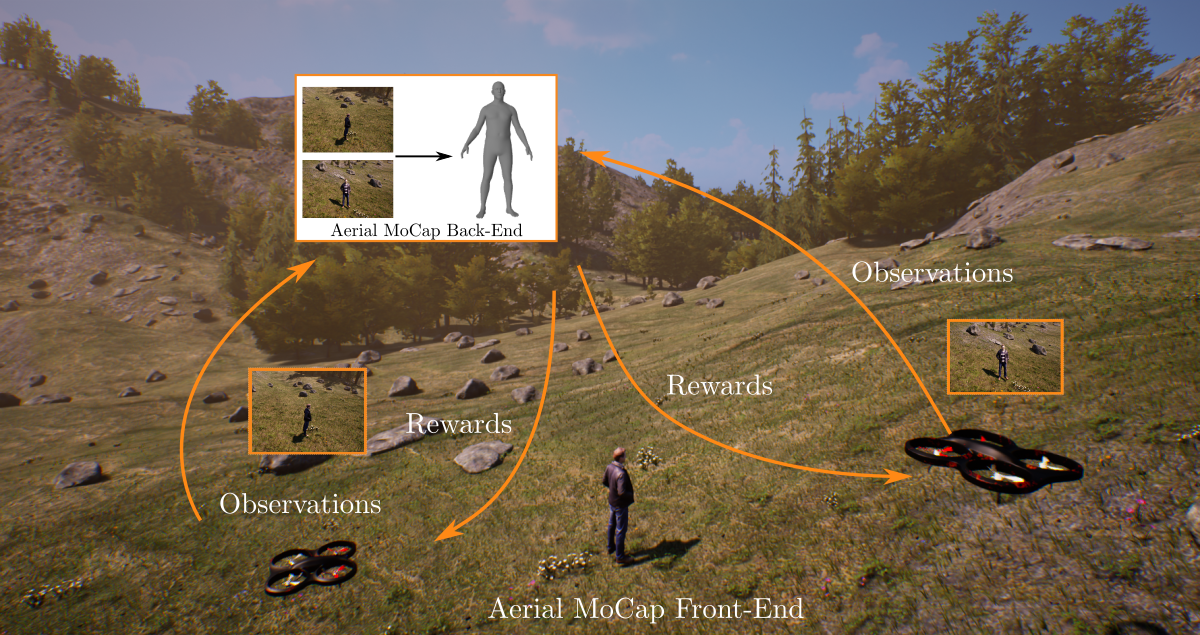
In this letter, we introduce a deep reinforcement learning (DRL) based multi-robot formation controller for the task of autonomous aerial human motion capture (MoCap). We focus on vision-based MoCap, where the objective is to estimate the trajectory of body pose, and shape of a single moving person using multiple micro aerial vehicles. State-of-the-art solutions to this problem are based on classical control methods, which depend on hand-crafted system, and observation models. Such models are difficult to derive, and generalize across different systems. Moreover, the non-linearities, and non-convexities of these models lead to sub-optimal controls. In our work, we formulate this problem as a sequential decision making task to achieve the vision-based motion capture objectives, and solve it using a deep neural network-based RL method. We leverage proximal policy optimization (PPO) to train a stochastic decentralized control policy for formation control. The neural network is trained in a parallelized setup in synthetic environments. We performed extensive simulation experiments to validate our approach. Finally, real-robot experiments demonstrate that our policies generalize to real world conditions.
| Author(s): | Rahul Tallamraju and Nitin Saini and Elia Bonetto and Michael Pabst and Yu Tang Liu and Michael Black and Aamir Ahmad |
| Journal: | IEEE Robotics and Automation Letters |
| Volume: | 5 |
| Number (issue): | 4 |
| Pages: | 6678--6685 |
| Year: | 2020 |
| Month: | October |
| Publisher: | IEEE |
| Project(s): | |
| BibTeX Type: | Article (article) |
| DOI: | 10.1109/LRA.2020.3013906 |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/9158379 |
| Digital: | True |
| Electronic Archiving: | grant_archive |
| Note: | Also accepted and presented in the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
BibTeX
@article{aircaprl,
title = {AirCapRL: Autonomous Aerial Human Motion Capture Using Deep Reinforcement Learning},
journal = {IEEE Robotics and Automation Letters},
abstract = {In this letter, we introduce a deep reinforcement learning (DRL) based multi-robot formation controller for the task of autonomous aerial human motion capture (MoCap). We focus on vision-based MoCap, where the objective is to estimate the trajectory of body pose, and shape of a single moving person using multiple micro aerial vehicles. State-of-the-art solutions to this problem are based on classical control methods, which depend on hand-crafted system, and observation models. Such models are difficult to derive, and generalize across different systems. Moreover, the non-linearities, and non-convexities of these models lead to sub-optimal controls. In our work, we formulate this problem as a sequential decision making task to achieve the vision-based motion capture objectives, and solve it using a deep neural network-based RL method. We leverage proximal policy optimization (PPO) to train a stochastic decentralized control policy for formation control. The neural network is trained in a parallelized setup in synthetic environments. We performed extensive simulation experiments to validate our approach. Finally, real-robot experiments demonstrate that our policies generalize to real world conditions.},
volume = {5},
number = {4},
pages = {6678--6685},
publisher = {IEEE},
month = oct,
year = {2020},
note = {Also accepted and presented in the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).},
author = {Tallamraju, Rahul and Saini, Nitin and Bonetto, Elia and Pabst, Michael and Liu, Yu Tang and Black, Michael and Ahmad, Aamir},
doi = {10.1109/LRA.2020.3013906},
url = {https://ieeexplore.ieee.org/document/9158379},
month_numeric = {10}
}