Dynamic Locomotion
Physical Intelligence
Technical Report
2022
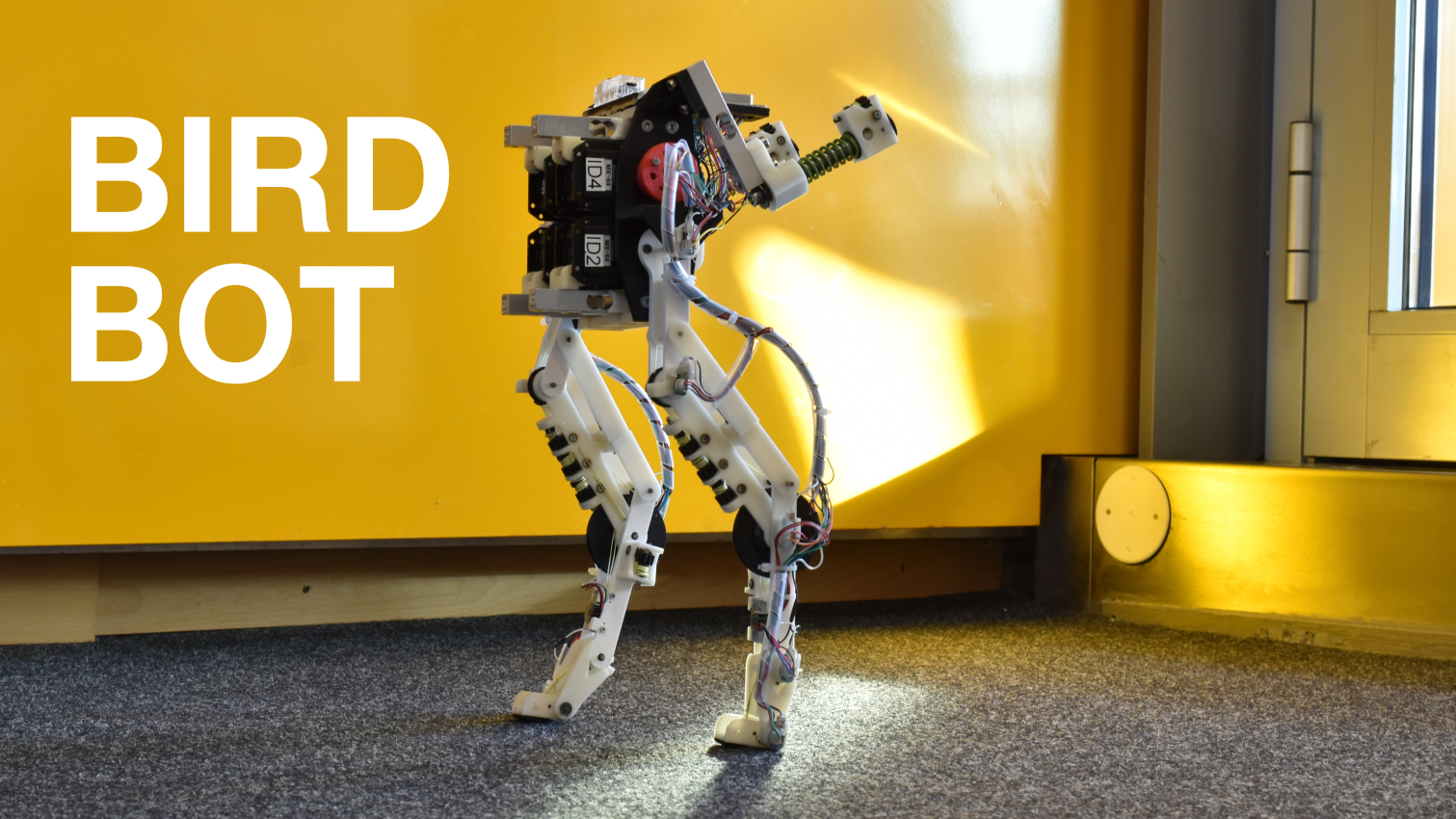
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching


| Author(s): | Alexander Badri-Spröwitz and Alborz Aghamaleki Sarvestani and Metin Sitti and Monica A. Daley |
| Year: | 2022 |
| Month: | March |
| Publisher: | Edmond |
| Project(s): | |
| BibTeX Type: | Technical Report (techreport) |
| Digital: | True |
| DOI: | 10.17617/3.ETFG41 |
| Electronic Archiving: | grant_archive |
BibTeX
@techreport{databb01,
title = {Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching},
publisher = {Edmond},
month = mar,
year = {2022},
author = {Badri-Spr{\"o}witz, Alexander and Sarvestani, Alborz Aghamaleki and Sitti, Metin and Daley, Monica A.},
doi = {10.17617/3.ETFG41},
month_numeric = {3}
}