Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Shape-programmable soft millirobots with multimodal adaptive locomotion
In previous studies, the shape-programmable magnetic materials have only been programmed for a small number of specific applications, as previous work can only rely on human intuition to approximate the required magnetization profile and actuating magnetic fields for such materials. We proposed a universal programming methodology that can automatically generate the desired magnetization profile and actuating fields for soft materials to achieve desired time-varying shapes. The universality of the proposed method can, therefore, enable other researchers to fully capitalize the potential of shape-programming technologies, allowing them to create a wide range of novel soft active surfaces and devices that are critical in robotics, material science, and medicine [![]() ].
].
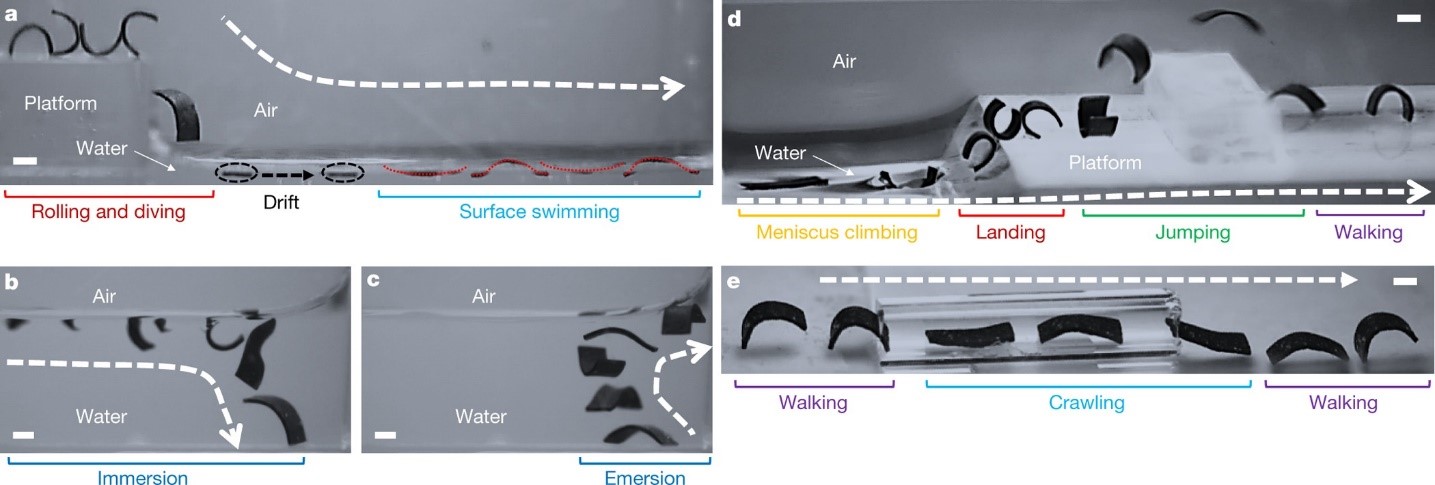
By using the above methodology, we then addressed a grand challenge facing the existing small-scale robots: multi-locomotion in complex terrains. Previous miniature robots have very limited mobility because they are unable to negotiate obstacles and changes in texture or material in unstructured environments. In our research, we demonstrate magneto-elastic soft millimeter-scale robots that can swim inside and on the surface of liquids, climb liquid menisci, roll and walk on solid surfaces, jump over obstacles, and crawl within narrow tunnels. These robots can transit reversibly between different liquid and solid terrains, as well as switch between locomotive modes. They can additionally execute pick-and-place and cargo-release tasks. The locomotion capability of these robots in fluid-filled confined spaces was particularly investigated as body sites are physically constrained and filled with stagnant (e.g., mucus) or flowing (e.g., blood) biological fluids [![]() ]. By utilizing the interaction between the dynamic soft-bodied deformation and the surrounding environments, these robots can transit between undulatory crawling mode and the undulatroy swimming mode, and can realize helical surface crawling mode that can go against or withstand the fluid flow in a cylindrical tube. With the in-depth understanding of their locomotion mechanism, we further proposed a series of design and control strategies to enhance their locomotion performance towards different working environments [
]. By utilizing the interaction between the dynamic soft-bodied deformation and the surrounding environments, these robots can transit between undulatory crawling mode and the undulatroy swimming mode, and can realize helical surface crawling mode that can go against or withstand the fluid flow in a cylindrical tube. With the in-depth understanding of their locomotion mechanism, we further proposed a series of design and control strategies to enhance their locomotion performance towards different working environments [![]() ].
].

Members





Publications