Adaptive Locomotion of Soft Microrobots
Networked Control and Communication
Controller Learning using Bayesian Optimization
Event-based Wireless Control of Cyber-physical Systems
Model-based Reinforcement Learning for PID Control
Learning Probabilistic Dynamics Models
Gaussian Filtering as Variational Inference
Smooth Loops from Unconstrained Video
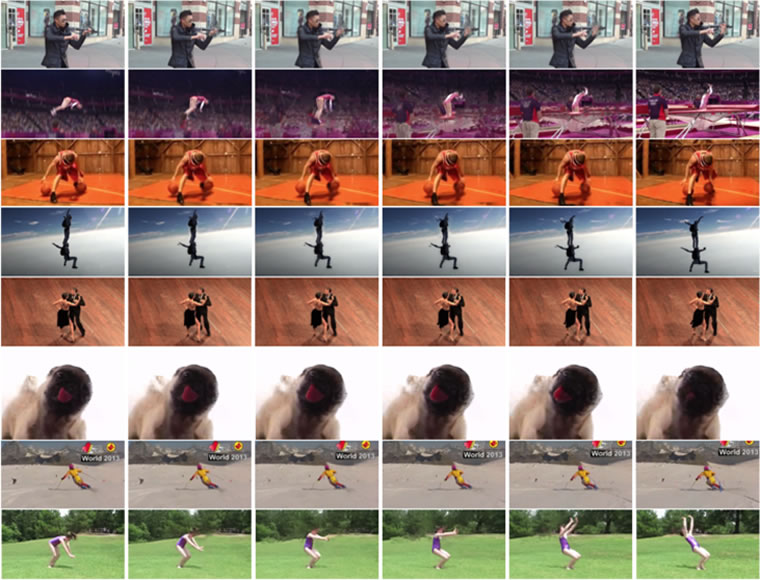
Converting unconstrained video sequences into videos that loop seamlessly is an extremely challenging problem. In this work, we take the first steps towards automating this process by focusing on an important subclass of videos containing a single dominant foreground object. Our technique makes two novel contributions over previous work: first, we propose a correspondence-based similarity metric to automatically identify a good transition point in the video where the appearance and dynamics of the foreground are most consistent. Second, we develop a technique that aligns both the foreground and background about this transition point using a combination of global camera path planning and patch-based video morphing. We demonstrate that this allows us to create natural, compelling, loopy videos from a wide range of videos collected from the internet.
Video
Members


Publications