Adaptive Locomotion of Soft Microrobots
Networked Control and Communication
Controller Learning using Bayesian Optimization
Event-based Wireless Control of Cyber-physical Systems
Model-based Reinforcement Learning for PID Control
Learning Probabilistic Dynamics Models
Gaussian Filtering as Variational Inference
Dynamic Locomotion
Video
Publications
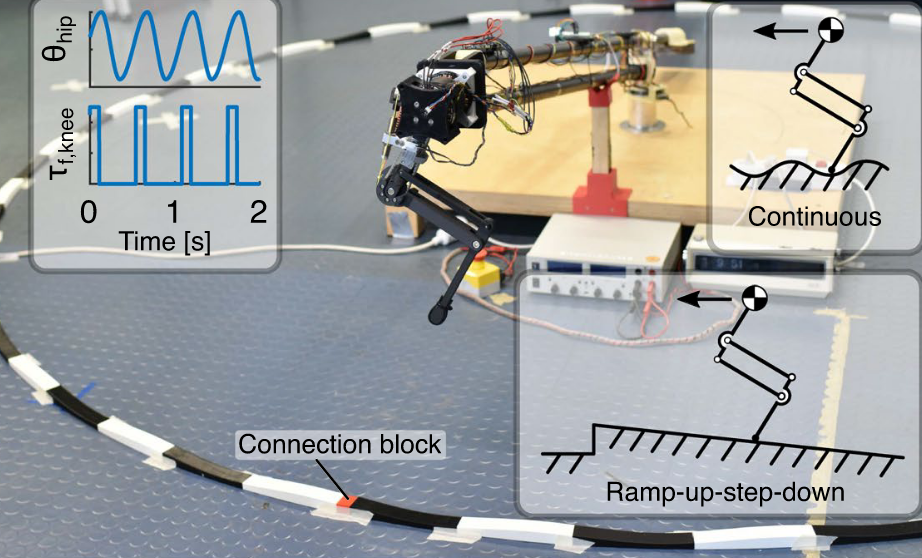
Physical damping trading off locomotion characteristics
Motivated by the concept of an adaptive mechanism triggering leading to rapid responses in the muscle-tendon architecture of animals [ ], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [].
], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [].
Motivated by the concept of an adaptive mechanism triggering leading to rapid responses in the muscle-tendon architecture of animals [![]() ], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [
], we developed a tunable physical damper comprise of a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation [![]() ].
].
Video
Publications
Dynamic Locomotion
Article
Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
Mo, A., Izzi, F., Gönen, E. C., Häufle, D., Badri-Spröwitz, A.
Scientific Reports, 13:3290, Nature Publishing Group, February 2023 (Published)
arxiv
Video
Journal URL
CAD and data
DOI
URL
BibTeX
Dynamic Locomotion
Article
Muscle Preflex Response to Perturbations in locomotion: In-vitro experiments and simulations with realistic boundary conditions
Araz, M., Weidner, S., Izzi, F., Badri-Spröwitz, A., Siebert, T., Haeufle, A. D. F. B.
Frontiers in Bioengineering and Biotechnology, 11, 2023 (Published)
DOI
URL
BibTeX