Adaptive Locomotion of Soft Microrobots
Networked Control and Communication
Controller Learning using Bayesian Optimization
Event-based Wireless Control of Cyber-physical Systems
Model-based Reinforcement Learning for PID Control
Learning Probabilistic Dynamics Models
Gaussian Filtering as Variational Inference
HuggieBot: Evolution of an Interactive Hugging Robot with Visual and Haptic Perception
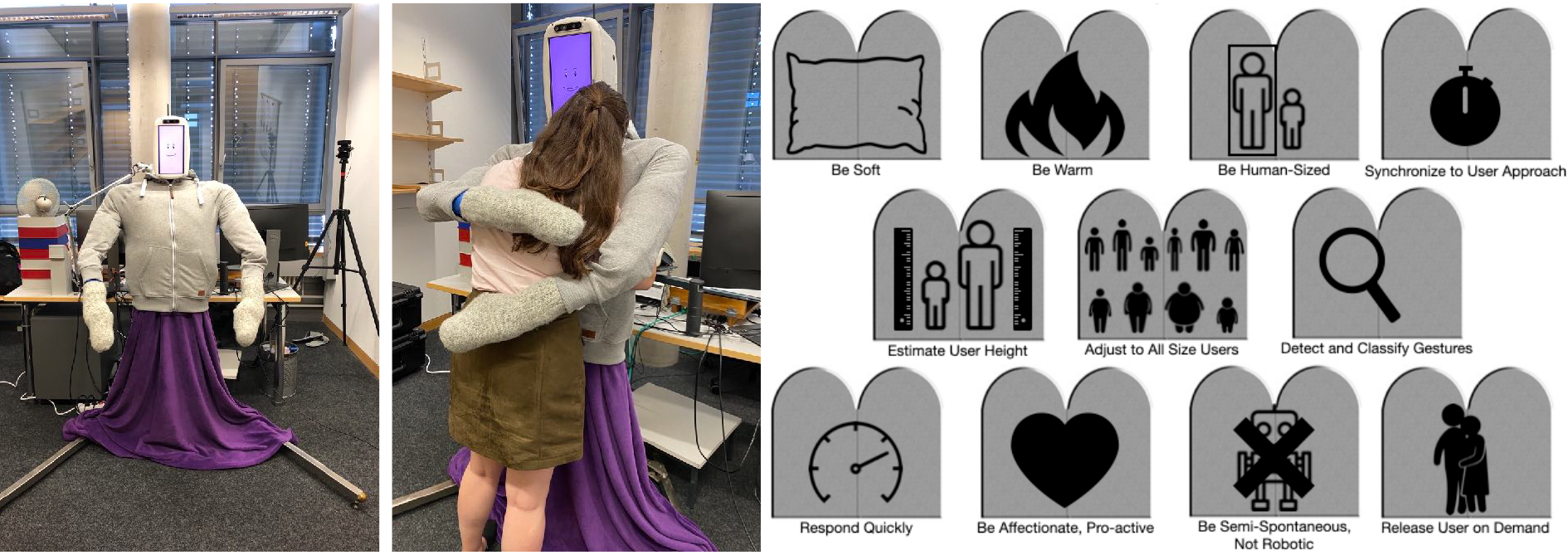
Hugs are complex interactions that must adapt to the height, body shape, actions, and preferences of the hugging partner. Because hugs are known to greatly benefit humans, we created a series of hugging robots that use visual and haptic perception to provide enjoyable interactive hugs. Each improved version of HuggieBot was evaluated by measuring how users emotionally and behaviorally responded to hugging it.
Building on research both within and outside of human-robot interaction, this project proposed eleven guidelines of natural and enjoyable robotic hugging. These eleven guidelines are essential to delivering high-quality robot hugs [![]() ]. We present these guidelines for designers to follow when creating new hugging robots to enhance user acceptance.
]. We present these guidelines for designers to follow when creating new hugging robots to enhance user acceptance.
In our initial work with HuggieBot 1.0 [![]()
![]()
![]()
![]() ], we evaluated user response to different robot physical characteristics and hugging behaviors. We then iteratively created three versions of an entirely new robotic platform, referred to as HuggieBot 2.0 [
], we evaluated user response to different robot physical characteristics and hugging behaviors. We then iteratively created three versions of an entirely new robotic platform, referred to as HuggieBot 2.0 [![]() ], 3.0 [
], 3.0 [![]() ], and 4.0 [
], and 4.0 [![]() ]. To enable perceptive and pleasing autonomous robot behavior, we investigated robot responses to four human intra-hug gestures: holding, rubbing, patting, and squeezing. We developed a real-time perceptual algorithm that detects and classifies user actions with 88% accuracy. The algorithm utilizes microphone and pressure sensor data collected from the robot's inflatable sensing torso, which we have named HuggieChest [
]. To enable perceptive and pleasing autonomous robot behavior, we investigated robot responses to four human intra-hug gestures: holding, rubbing, patting, and squeezing. We developed a real-time perceptual algorithm that detects and classifies user actions with 88% accuracy. The algorithm utilizes microphone and pressure sensor data collected from the robot's inflatable sensing torso, which we have named HuggieChest [![]()
![]() ]. We also created a probabilistic behavior algorithm that chooses natural robot responses in real time.
]. We also created a probabilistic behavior algorithm that chooses natural robot responses in real time.
The results of our five user studies validated our eleven hugging guidelines and informed the iterative design of HuggieBot [![]() ]. Users enjoy robot softness, robot warmth, and being physically squeezed by the robot. Users dislike being released too soon from a hug and equally dislike being held by the robot for too long. Adding haptic reactivity definitively improves user perception of a hugging robot; the robot's responses and proactive intra-hug gestures were greatly enjoyed. In our last study, we learned that HuggieBot can positively affect users on a physiological level and can be comparable to hugging a person. Participants consistently have more favorable opinions about hugging robots after prolonged interaction with HuggieBot in all our research studies.
]. Users enjoy robot softness, robot warmth, and being physically squeezed by the robot. Users dislike being released too soon from a hug and equally dislike being held by the robot for too long. Adding haptic reactivity definitively improves user perception of a hugging robot; the robot's responses and proactive intra-hug gestures were greatly enjoyed. In our last study, we learned that HuggieBot can positively affect users on a physiological level and can be comparable to hugging a person. Participants consistently have more favorable opinions about hugging robots after prolonged interaction with HuggieBot in all our research studies.
Members




Publications