Adaptive Locomotion of Soft Microrobots
Networked Control and Communication
Controller Learning using Bayesian Optimization
Event-based Wireless Control of Cyber-physical Systems
Model-based Reinforcement Learning for PID Control
Learning Probabilistic Dynamics Models
Gaussian Filtering as Variational Inference
Heterogeneous Multiple Soft Millirobots in Three-dimensional Lumens
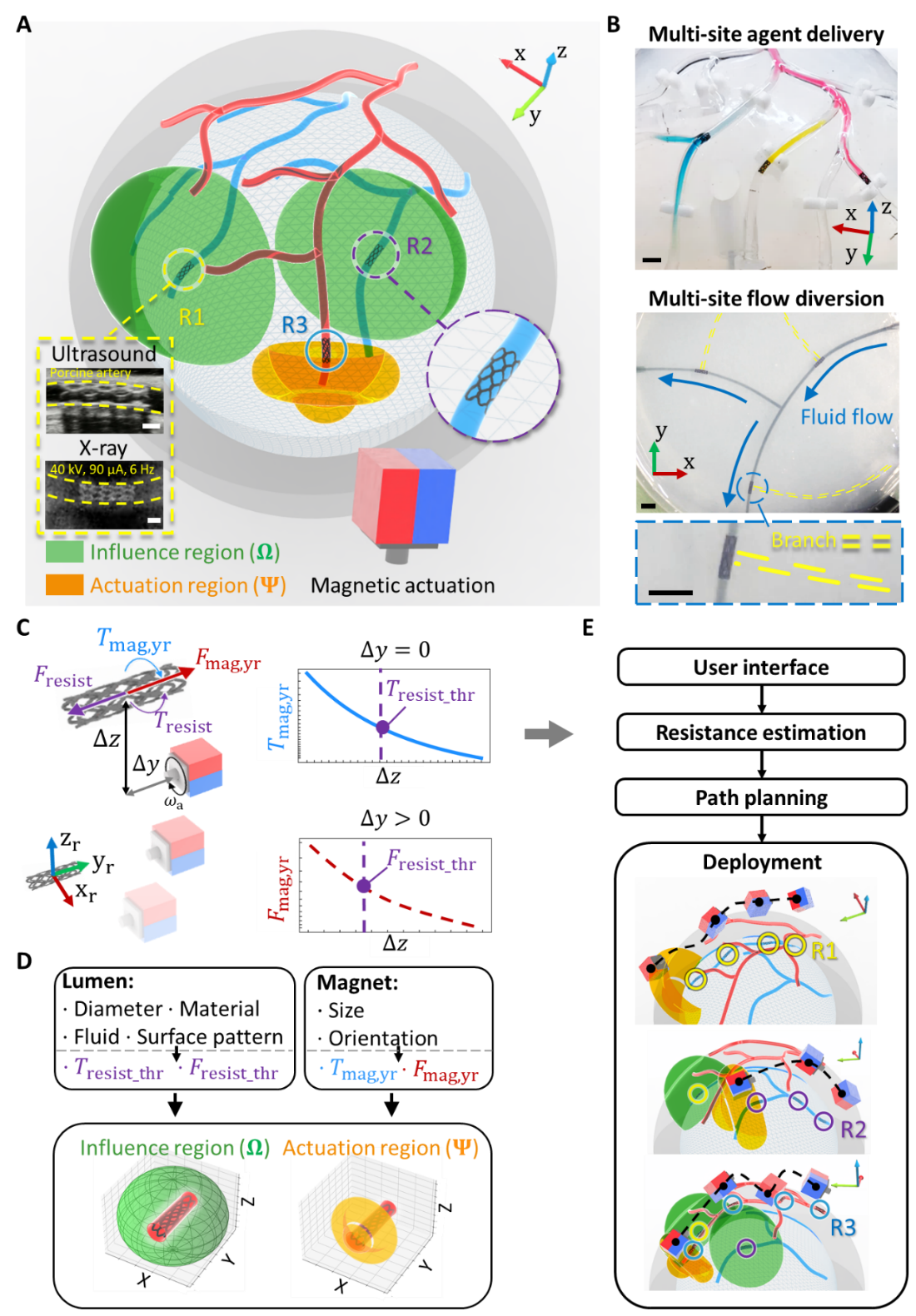
Miniature soft robots offer new opportunities for safe and physically adaptive medical interventions in hard-to-reach regions. Deploying multiple robots could further enhance the efficacy and multifunctionality of these operations. However, multi-robot deployment in physiologically relevant three-dimensional (3D) tubular structures is limited by the lack of effective mechanisms for independent control of miniature magnetic soft robots. This work presents a framework leveraging the shape-adaptive robotic design and heterogenous resistance from robot-lumen interactions to enable magnetic multi-robot control. We first compute influence and actuation regions to quantify robot movement. Subsequently, a path planning algorithm generates the trajectory of a permanent magnet for multi-robot navigation in 3D lumens. Finally, robots are controlled individually in multi-layer lumen networks under medical imaging. Demonstrations of multi-location cargo delivery and flow diversion manifest their potential to enhance biomedical functions. This framework offers a solution to multi-robot actuation benefiting applications across different miniature robotic devices in complex environments.
Members




Publications