Adaptive Locomotion of Soft Microrobots
Networked Control and Communication
Controller Learning using Bayesian Optimization
Event-based Wireless Control of Cyber-physical Systems
Model-based Reinforcement Learning for PID Control
Learning Probabilistic Dynamics Models
Gaussian Filtering as Variational Inference
Gaussian Garments
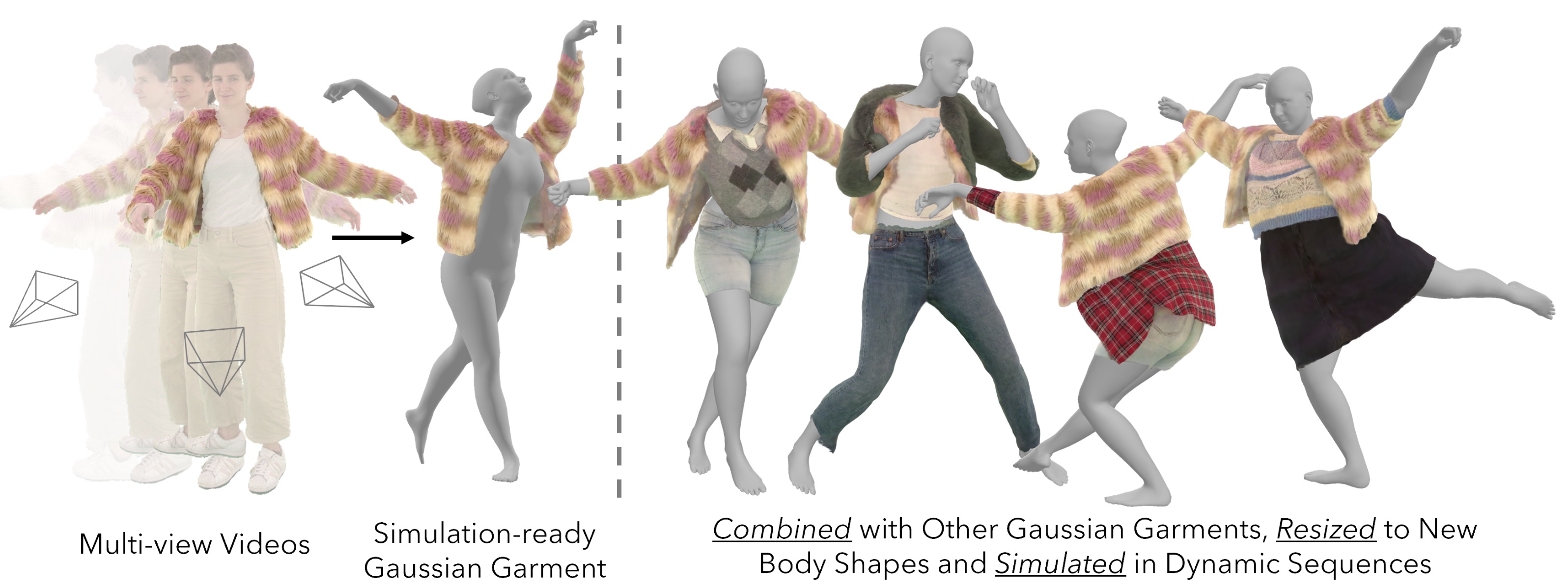
We introduce Gaussian Garments, a novel approach for reconstructing realistic-looking, simulation-ready garment assets from multi-view videos. Our method represents garments with a combination of a 3D mesh and a Gaussian texture that encodes both the color and high-frequency surface details. This representation enables accurate registration of garment geometries to multi-view videos and helps disentangle albedo textures from lighting effects. Furthermore, we demonstrate how a pre-trained Graph Neural Network (GNN) can be fine-tuned to replicate the real behavior of each garment. The reconstructed Gaussian Garments can be automatically combined into multi-garment outfits and animated with the fine-tuned GNN.
Publications