Adaptive Locomotion of Soft Microrobots
Networked Control and Communication
Controller Learning using Bayesian Optimization
Event-based Wireless Control of Cyber-physical Systems
Model-based Reinforcement Learning for PID Control
Learning Probabilistic Dynamics Models
Gaussian Filtering as Variational Inference
Convergence and Stability of GAN training
Generative Adversarial Networks (GANs) are powerful latent variable models that can be used to learn complex real-world distributions. Especially for images, GANs have emerged as one of the dominant approaches for generating new realistically looking samples after the model has been trained on some dataset. However, while very powerful, GANs can be hard to train and in practice it is often observed that gradient descent based GAN optimization does not lead to convergence.
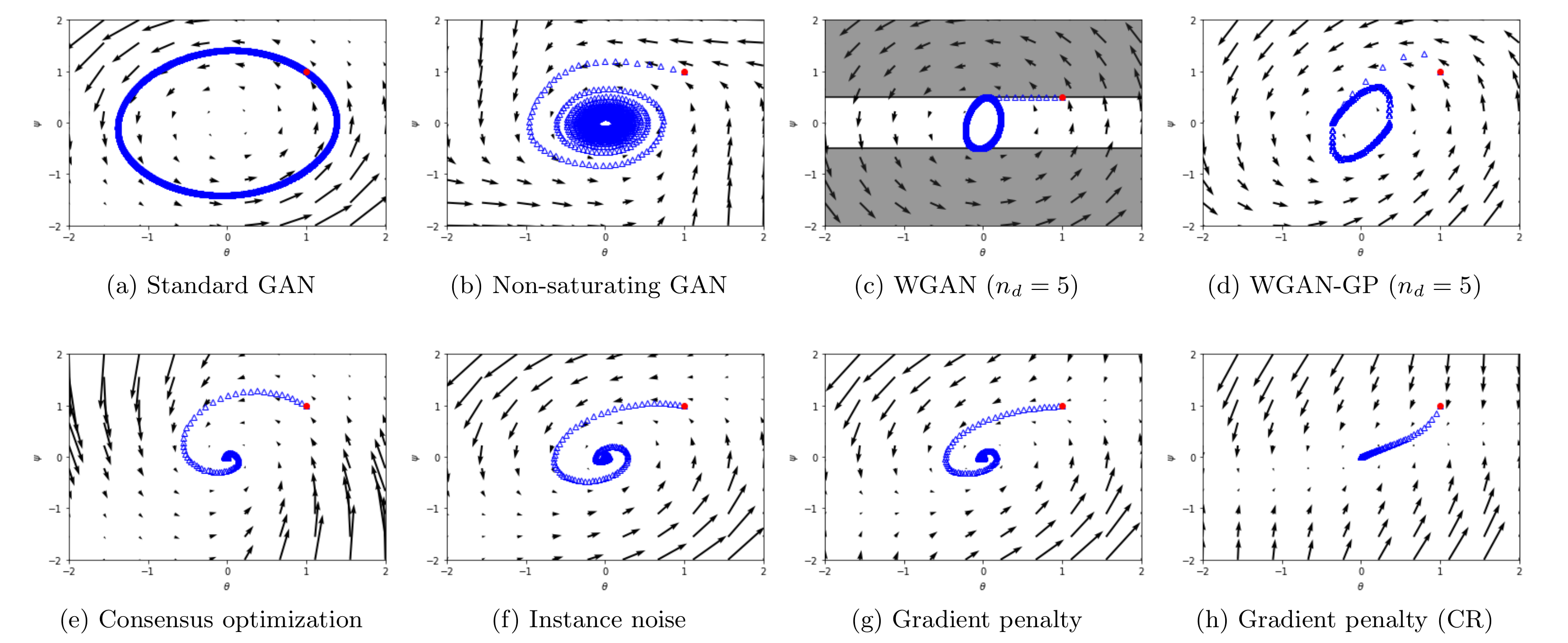
In this project, we analyze the stability of the GAN training dynamics using tools from discrete contol theory [![]() ]. We theoretically show that the main factors preventing state-of-the-art algorithms from converging are the presence of eigenvalues of the Jacobian of the associated gradient vector field with zero real-part and eigenvalues with a large imaginary part [
]. We theoretically show that the main factors preventing state-of-the-art algorithms from converging are the presence of eigenvalues of the Jacobian of the associated gradient vector field with zero real-part and eigenvalues with a large imaginary part [![]() ]. This enables us to characterize the convergence properties of various training methods for GANs and derive new training methods that have better convergence properties [
]. This enables us to characterize the convergence properties of various training methods for GANs and derive new training methods that have better convergence properties [![]() ]. Empirically, we find our training methods to work well in practice and use them to learn high-resolution generative image models for a variety of datasets, including a generative model for all 1000 imagenet classes and a generative model for the celebA-HQ dataset at resolution 1024×1024, with little hyperparameter tuning.
]. Empirically, we find our training methods to work well in practice and use them to learn high-resolution generative image models for a variety of datasets, including a generative model for all 1000 imagenet classes and a generative model for the celebA-HQ dataset at resolution 1024×1024, with little hyperparameter tuning.
Members


Publications