Implementation of a 6-DOF Parallel Continuum Manipulator for Delivering Fingertip Tactile Cues

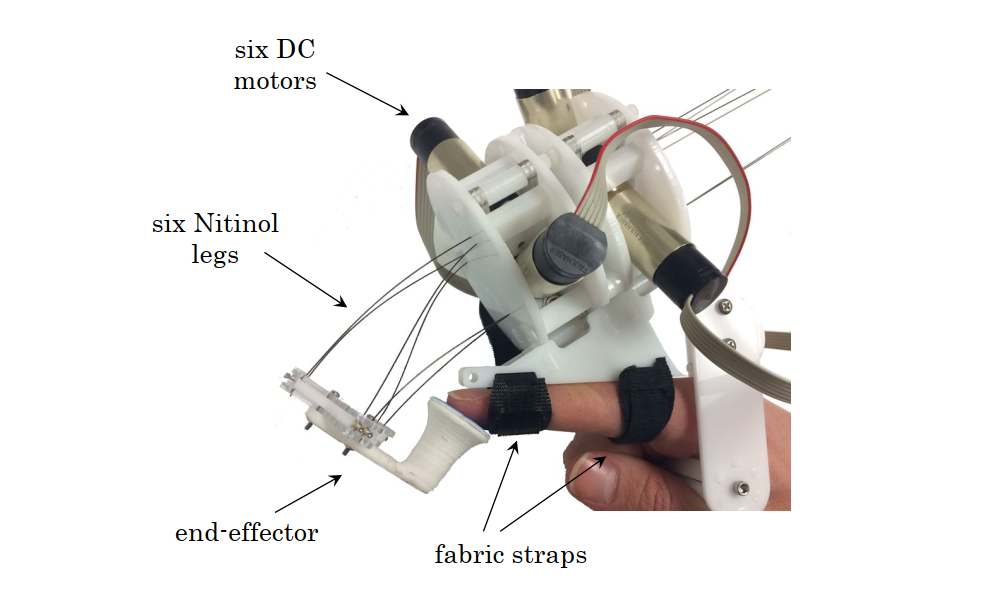
Existing fingertip haptic devices can deliver different subsets of tactile cues in a compact package, but we have not yet seen a wearable six-degree-of-freedom (6-DOF) display. This paper presents the Fuppeteer (short for Fingertip Puppeteer), a device that is capable of controlling the position and orientation of a flat platform, such that any combination of normal and shear force can be delivered at any location on any human fingertip. We build on our previous work of designing a parallel continuum manipulator for fingertip haptics by presenting a motorized version in which six flexible Nitinol wires are actuated via independent roller mechanisms and proportional-derivative controllers. We evaluate the settling time and end-effector vibrations observed during system responses to step inputs. After creating a six-dimensional lookup table and adjusting simulated inputs using measured Jacobians, we show that the device can make contact with all parts of the fingertip with a mean error of 1.42 mm. Finally, we present results from a human-subject study. A total of 24 users discerned 9 evenly distributed contact locations with an average accuracy of 80.5%. Translational and rotational shear cues were identified reasonably well near the center of the fingertip and more poorly around the edges.
| Author(s): | Eric M. Young and Katherine J. Kuchenbecker |
| Journal: | IEEE Transactions on Haptics |
| Volume: | 12 |
| Number (issue): | 3 |
| Pages: | 295--306 |
| Year: | 2019 |
| Month: | June |
| Project(s): | |
| Bibtex Type: | Article (article) |
| DOI: | 10.1109/TOH.2019.2920928 |
| State: | Published |
| Electronic Archiving: | grant_archive |
BibTex
@article{Young19-TH-Parallel,
title = {Implementation of a 6-{DOF} Parallel Continuum Manipulator for Delivering Fingertip Tactile Cues},
journal = {IEEE Transactions on Haptics},
abstract = {Existing fingertip haptic devices can deliver different subsets of tactile cues in a compact package, but we have not yet seen a wearable six-degree-of-freedom (6-DOF) display. This paper presents the Fuppeteer (short for Fingertip Puppeteer), a device that is capable of controlling the position and orientation of a flat platform, such that any combination of normal and shear force can be delivered at any location on any human fingertip. We build on our previous work of designing a parallel continuum manipulator for fingertip haptics by presenting a motorized version in which six flexible Nitinol wires are actuated via independent roller mechanisms and proportional-derivative controllers. We evaluate the settling time and end-effector vibrations observed during system responses to step inputs. After creating a six-dimensional lookup table and adjusting simulated inputs using measured Jacobians, we show that the device can make contact with all parts of the fingertip with a mean error of 1.42 mm. Finally, we present results from a human-subject study. A total of 24 users discerned 9 evenly distributed contact locations with an average accuracy of 80.5%. Translational and rotational shear cues were identified reasonably well near the center of the fingertip and more poorly around the edges.},
volume = {12},
number = {3},
pages = {295--306},
month = jun,
year = {2019},
slug = {young19-th-parallel},
author = {Young, Eric M. and Kuchenbecker, Katherine J.},
month_numeric = {6}
}