Empirical Inference
Robotics
Miscellaneous
2021
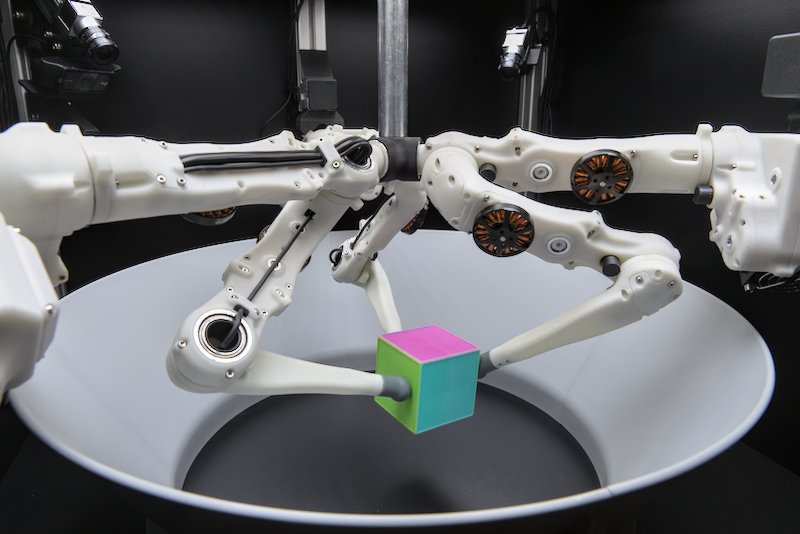
A Robot Cluster for Reproducible Research in Dexterous Manipulation
arXiv


Empirical Inference


Empirical Inference

| Author(s): | Wüthrich*, M. and Widmaier*, F. and Bauer*, S. and Funk, N. and Urain, J. and Peters, J. and Watson, J. and Chen, C. and Srinivasan, K. and Zhang, J. and Zhang, J. and Walter, M. R. and Madan, R. and Schaff, C. and Maeda, T. and Yoneda, T. and Yarats, D. and Allshire, A. and Gordon, E. K. and Bhattacharjee, T. and Srinivasa, S. S. and Garg, A. and Buchholz, A. and Stark, S. and Steinbrenner, T. and Akpo, J. and Joshi, S. and Agrawal, V. and Schölkopf, B. |
| Links: | |
| Year: | 2021 |
| BibTeX Type: | Miscellaneous (misc) |
| Electronic Archiving: | grant_archive |
| Note: | *equal contribution |
| State: | Published |
BibTeX
@misc{Baueretal21,
title = {A Robot Cluster for Reproducible Research in Dexterous Manipulation},
year = {2021},
note = {*equal contribution},
author = {W{\"u}thrich*, M. and Widmaier*, F. and Bauer*, S. and Funk, N. and Urain, J. and Peters, J. and Watson, J. and Chen, C. and Srinivasan, K. and Zhang, J. and Zhang, J. and Walter, M. R. and Madan, R. and Schaff, C. and Maeda, T. and Yoneda, T. and Yarats, D. and Allshire, A. and Gordon, E. K. and Bhattacharjee, T. and Srinivasa, S. S. and Garg, A. and Buchholz, A. and Stark, S. and Steinbrenner, T. and Akpo, J. and Joshi, S. and Agrawal, V. and Sch{\"o}lkopf, B.}
}