
2024
hi
Mohan, M., Kuchenbecker, K. J.
Demonstration: OCRA - A Kinematic Retargeting Algorithm for Expressive Whole-Arm Teleoperation
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
al
hi
ei
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
hi
Bartels, J. U., Sanchez-Tamayo, N., Sedlmair, M., Kuchenbecker, K. J.
Active Haptic Feedback for a Virtual Wrist-Anchored User Interface
Hands-on demonstration presented at the ACM Symposium on User Interface Software and Technology (UIST), Pittsburgh, USA, October 2024 (misc) Accepted
hi
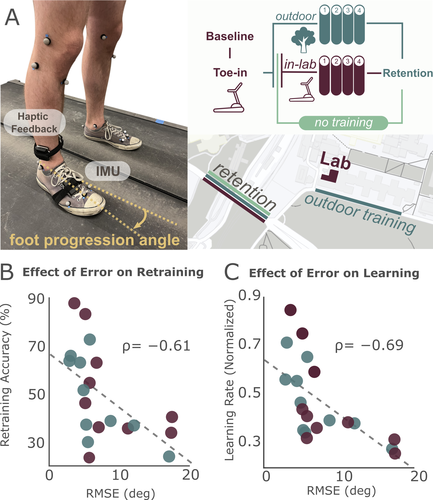
Rokhmanova, N., Martus, J., Faulkner, R., Fiene, J., Kuchenbecker, K. J.
Modeling Shank Tissue Properties and Quantifying Body Composition with a Wearable Actuator-Accelerometer Set
Extended abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Madison, USA, August 2024 (misc)
hi
Schulz, A., Serhat, G., Kuchenbecker, K. J.
Adapting a High-Fidelity Simulation of Human Skin for Comparative Touch Sensing
Extended abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Madison, USA, August 2024 (misc)
hi
Lev, H. K., Sharon, Y., Geftler, A., Nisky, I.
Errors in Long-Term Robotic Surgical Training
Work-in-progress paper (3 pages) presented at the EuroHaptics Conference, Lille, France, June 2024 (misc)
hi
zwe-rob
Rokhmanova, N., Martus, J., Faulkner, R., Fiene, J., Kuchenbecker, K. J.
GaitGuide: A Wearable Device for Vibrotactile Motion Guidance
Workshop paper (3 pages) presented at the ICRA Workshop on Advancing Wearable Devices and Applications Through Novel Design, Sensing, Actuation, and AI, Yokohama, Japan, May 2024 (misc)
hi
Sundaram, V. H., Smith, L., Turin, Z., Rentschler, M. E., Welker, C. G.
Three-Dimensional Surface Reconstruction of a Soft System via Distributed Magnetic Sensing
Workshop paper (3 pages) presented at the ICRA Workshop on Advancing Wearable Devices and Applications Through Novel Design, Sensing, Actuation, and AI, Yokohama, Japan, May 2024 (misc)
hi
Javot, B., Nguyen, V. H., Ballardini, G., Kuchenbecker, K. J.
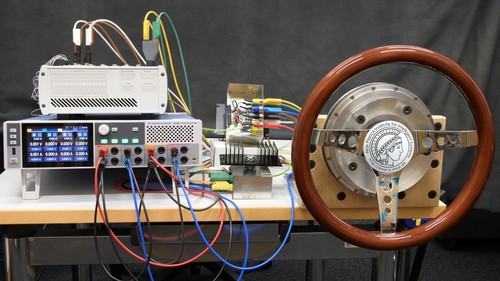
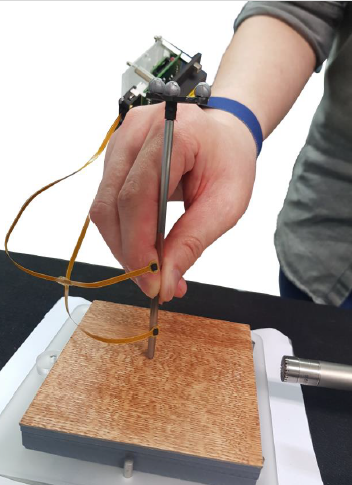
CAPT Motor: A Strong Direct-Drive Rotary Haptic Interface
Hands-on demonstration presented at the IEEE Haptics Symposium, Long Beach, USA, April 2024 (misc)
hi
Fazlollahi, F., Seifi, H., Ballardini, G., Taghizadeh, Z., Schulz, A., MacLean, K. E., Kuchenbecker, K. J.
Quantifying Haptic Quality: External Measurements Match Expert Assessments of Stiffness Rendering Across Devices
Work-in-progress paper (2 pages) presented at the IEEE Haptics Symposium, Long Beach, USA, April 2024 (misc)
hi
rm
Sanchez-Tamayo, N., Yoder, Z., Ballardini, G., Rothemund, P., Keplinger, C., Kuchenbecker, K. J.
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Multimodal Haptic Feedback
Extended abstract (1 page) presented at the IEEE RoboSoft Workshop on Multimodal Soft Robots for Multifunctional Manipulation, Locomotion, and Human-Machine Interaction, San Diego, USA, April 2024 (misc)
hi
rm
Sanchez-Tamayo, N., Yoder, Z., Ballardini, G., Rothemund, P., Keplinger, C., Kuchenbecker, K. J.
Cutaneous Electrohydraulic Wearable Devices for Expressive and Salient Haptic Feedback
Hands-on demonstration presented at the IEEE Haptics Symposium, Long Beach, USA, April 2024 (misc)
hi
rm
Sanchez-Tamayo, N., Yoder, Z., Ballardini, G., Rothemund, P., Keplinger, C., Kuchenbecker, K. J.
Demonstration: Cutaneous Electrohydraulic (CUTE) Wearable Devices for Expressive and Salient Haptic Feedback
Hands-on demonstration presented at the IEEE RoboSoft Conference, San Diego, USA, April 2024 (misc)
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
hi
Schulz, A., Serhat, G., Kuchenbecker, K. J.
Adapting a High-Fidelity Simulation of Human Skin for Comparative Touch Sensing in the Elephant Trunk
Abstract presented at the Society for Integrative and Comparative Biology Annual Meeting (SICB), Seattle, USA, January 2024 (misc)
hi
Khojasteh, B., Shao, Y., Kuchenbecker, K. J.
MPI-10: Haptic-Auditory Measurements from Tool-Surface Interactions
Dataset published as a companion to the journal article "Robust Surface Recognition with the Maximum Mean Discrepancy: Degrading Haptic-Auditory Signals through Bandwidth and Noise" in IEEE Transactions on Haptics, January 2024 (misc)

zwe-csfm
hi
Schulz, A., Kaufmann, L., Brecht, M., Richter, G., Kuchenbecker, K. J.
Whiskers That Don’t Whisk: Unique Structure From the Absence of Actuation in Elephant Whiskers
Abstract presented at the Society for Integrative and Comparative Biology Annual Meeting (SICB), Seattle, USA, January 2024 (misc)
ei
Bonse, M. J., Gebhard, T. D., Dannert, F. A., Absil, O., Cantalloube, F., Christiaens, V., Cugno, G., Garvin, E. O., Hayoz, J., Kasper, M., Matthews, E., Schölkopf, B., Quanz, S. P.
Use the 4S (Signal-Safe Speckle Subtraction): Explainable Machine Learning reveals the Giant Exoplanet AF Lep b in High-Contrast Imaging Data from 2011
2024 (misc) Submitted
hi
Landin, N., Romano, J. M., McMahan, W., Kuchenbecker, K. J.
Discrete Fourier Transform Three-to-One (DFT321): Code
MATLAB code of discrete fourier transform three-to-one (DFT321), 2024 (misc)
ei
Rajendran, G., Buchholz, S., Aragam, B., Schölkopf, B., Ravikumar, P.
Learning Interpretable Concepts: Unifying Causal Representation Learning and Foundation Models
2024 (misc)
2023
hi
Khojasteh, B., Shao, Y., Kuchenbecker, K. J.
Seeking Causal, Invariant, Structures with Kernel Mean Embeddings in Haptic-Auditory Data from Tool-Surface Interaction
Workshop paper (4 pages) presented at the IROS Workshop on Causality for Robotics: Answering the Question of Why, Detroit, USA, October 2023 (misc)
hi
Garrofé, G., Schoeffmann, C., Zangl, H., Kuchenbecker, K. J., Lee, H.
NearContact: Accurate Human Detection using Tomographic Proximity and Contact Sensing with Cross-Modal Attention
Extended abstract (4 pages) presented at the International Workshop on Human-Friendly Robotics (HFR), Munich, Germany, September 2023 (misc)
hi
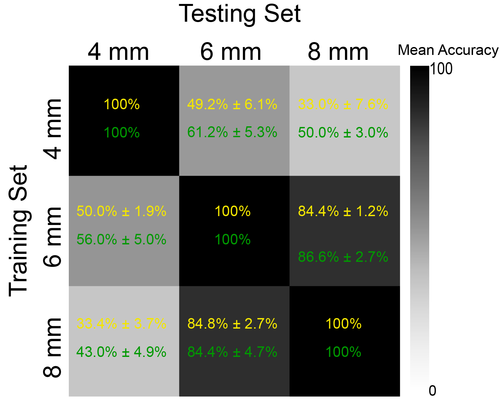
Rokhmanova, N., Pearl, O., Kuchenbecker, K. J., Halilaj, E.
The Role of Kinematics Estimation Accuracy in Learning with Wearable Haptics
Abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Knoxville, USA, August 2023 (misc)
hi
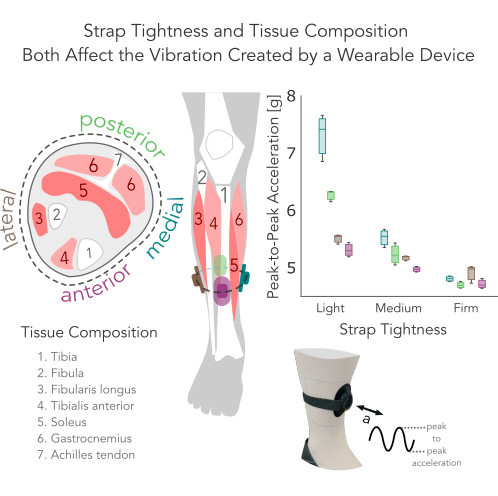
Rokhmanova, N., Faulkner, R., Martus, J., Fiene, J., Kuchenbecker, K. J.
Strap Tightness and Tissue Composition Both Affect the Vibration Created by a Wearable Device
Work-in-progress paper (1 page) presented at the IEEE World Haptics Conference (WHC), Delft, The Netherlands, July 2023 (misc)
hi
Ballardini, G., Kuchenbecker, K. J.
Toward a Device for Reliable Evaluation of Vibrotactile Perception
Work-in-progress paper (1 page) presented at the IEEE World Haptics Conference (WHC), Delft, The Netherlands, July 2023 (misc)
hi
Khojasteh, B., Solowjow, F., Trimpe, S., Kuchenbecker, K. J.
Multimodal Multi-User Surface Recognition with the Kernel Two-Sample Test: Code
Code published as a companion to the journal article "Multimodal Multi-User Surface Recognition with the Kernel Two-Sample Test" in IEEE Transactions on Automation Science and Engineering, July 2023 (misc)
hi
Fazlollahi, F., Taghizadeh, Z., Kuchenbecker, K. J.
Improving Haptic Rendering Quality by Measuring and Compensating for Undesired Forces
Work-in-progress paper (1 page) presented at the IEEE World Haptics Conference (WHC), Delft, The Netherlands, July 2023 (misc)
hi
Khojasteh, B., Shao, Y., Kuchenbecker, K. J.
Capturing Rich Auditory-Haptic Contact Data for Surface Recognition
Work-in-progress paper (1 page) presented at the IEEE World Haptics Conference (WHC), Delft, The Netherlands, July 2023 (misc)
hi
Gong, Y., Javot, B., Lauer, A. P. R., Sawodny, O., Kuchenbecker, K. J.
AiroTouch: Naturalistic Vibrotactile Feedback for Telerobotic Construction
Hands-on demonstration presented at the IEEE World Haptics Conference, Delft, The Netherlands, July 2023 (misc)
hi
Javot, B., Nguyen, V. H., Ballardini, G., Kuchenbecker, K. J.
CAPT Motor: A Strong Direct-Drive Haptic Interface
Hands-on demonstration presented at the IEEE World Haptics Conference, Delft, The Netherlands, July 2023 (misc)
hi
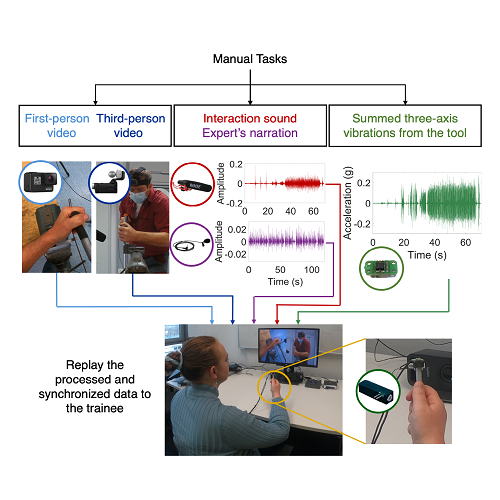
Gourishetti, R., Javot, B., Kuchenbecker, K. J.
Can Recording Expert Demonstrations with Tool Vibrations Facilitate Teaching of Manual Skills?
Work-in-progress paper (1 page) presented at the IEEE World Haptics Conference (WHC), Delft, The Netherlands, July 2023 (misc)

hi
Burns, R. B.
Creating a Haptic Empathetic Robot Animal for Children with Autism
Workshop paper (4 pages) presented at the RSS Pioneers Workshop, Daegu, South Korea, July 2023 (misc)
hi
Gueorguiev, D., Rohou–Claquin, B., Kuchenbecker, K. J.
The Influence of Amplitude and Sharpness on the Perceived Intensity of Isoenergetic Ultrasonic Signals
Work-in-progress paper (1 page) presented at the IEEE World Haptics Conference (WHC), Delft, The Netherlands, July 2023 (misc)
hi
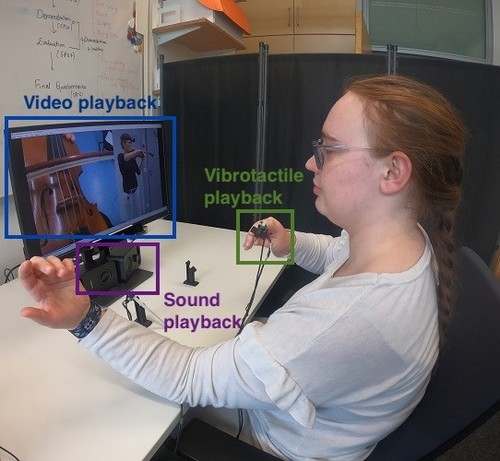
Gourishetti, R., Hughes, A. G., Javot, B., Kuchenbecker, K. J.
Vibrotactile Playback for Teaching Manual Skills from Expert Recordings
Hands-on demonstration presented at the IEEE World Haptics Conference, Delft, The Netherlands, July 2023 (misc)

hi
Gong, Y., Javot, B., Lauer, A. P. R., Sawodny, O., Kuchenbecker, K. J.
Naturalistic Vibrotactile Feedback Could Facilitate Telerobotic Assembly on Construction Sites
Poster presented at the ICRA Workshop on Future of Construction: Robot Perception, Mapping, Navigation, Control in Unstructured and Cluttered Environments, London, UK, June 2023 (misc)

hi
Gong, Y., Tashiro, N., Javot, B., Lauer, A. P. R., Sawodny, O., Kuchenbecker, K. J.
AiroTouch: Naturalistic Vibrotactile Feedback for Telerobotic Construction-Related Tasks
Extended abstract (1 page) presented at the ICRA Workshop on Communicating Robot Learning across Human-Robot Interaction, London, UK, May 2023 (misc)
hi
Caccianiga, G., Nubert, J., Hutter, M., Kuchenbecker., K. J.
3D Reconstruction for Minimally Invasive Surgery: Lidar Versus Learning-Based Stereo Matching
Workshop paper (2 pages) presented at the ICRA Workshop on Robot-Assisted Medical Imaging, London, UK, May 2023 (misc)
hi
Khojasteh, B., Shao, Y., Kuchenbecker, K. J.
Surface Perception through Haptic-Auditory Contact Data
Workshop paper (4 pages) presented at the ICRA Workshop on Embracing Contacts, London, UK, May 2023 (misc)

hi
Mohan, M., Kuchenbecker, K. J.
OCRA: An Optimization-Based Customizable Retargeting Algorithm for Teleoperation
Workshop paper (3 pages) presented at the ICRA Workshop Toward Robot Avatars, London, UK, May 2023 (misc)
hi
Rokhmanova, N.
Wearable Biofeedback for Knee Joint Health
Extended abstract (5 pages) presented at the ACM SIGCHI Conference on Human Factors in Computing Systems (CHI) Doctoral Consortium, Hamburg, Germany, April 2023 (misc)
hi
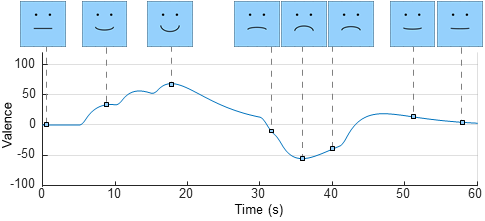
Burns, R. B., Kuchenbecker, K. J.
A Lasting Impact: Using Second-Order Dynamics to Customize the Continuous Emotional Expression of a Social Robot
Workshop paper (5 pages) presented at the HRI Workshop on Lifelong Learning and Personalization in Long-Term Human-Robot Interaction (LEAP-HRI), Stockholm, Sweden, March 2023 (misc)
dlg
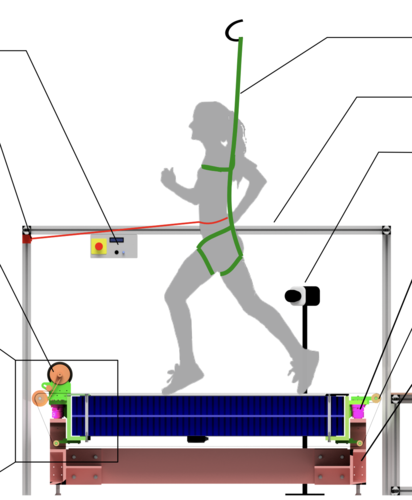
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
Bottou, L., Schölkopf, B.
Borges und die Künstliche Intelligenz
2023, published in Frankfurter Allgemeine Zeitung, 18 December 2023, Nr. 294 (misc)
2022
al
hi
Richardson, B. A., Kuchenbecker, K. J., Martius, G.
A Sequential Group VAE for Robot Learning of Haptic Representations
pages: 1-11, Workshop paper (8 pages) presented at the CoRL Workshop on Aligning Robot Representations with Humans, Auckland, New Zealand, December 2022 (misc)
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
hi
L’Orsa, R., Lotbiniere-Bassett, M. D., Zareinia, K., Lama, S., Westwick, D., Sutherland, G., Kuchenbecker, K. J.
Semi-Automated Robotic Pleural Cavity Access in Space
Poster presented at the Canadian Space Health Research Symposium (CSHRS), Alberta, Canada, November 2022 (misc)
hi
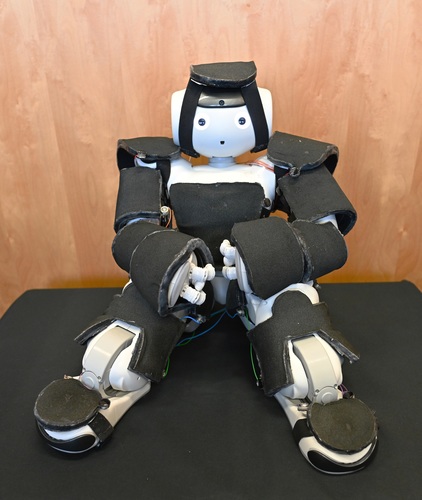
Burns, R. B., Rosenthal, R., Garg, K., Kuchenbecker, K. J.
Do-It-Yourself Whole-Body Social-Touch Perception for a NAO Robot
Workshop paper (1 page) presented at the IROS Workshop on Large-Scale Robotic Skin: Perception, Interaction and Control, Kyoto, Japan, October 2022 (misc)