
2024
hi
Rokhmanova, N., Martus, J., Faulkner, R., Fiene, J., Kuchenbecker, K. J.
Modeling Shank Tissue Properties and Quantifying Body Composition with a Wearable Actuator-Accelerometer Set
Extended abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Madison, USA, August 2024 (misc) Accepted
hi
Schulz, A., Serhat, G., Kuchenbecker, K. J.
Adapting a High-Fidelity Simulation of Human Skin for Comparative Touch Sensing
Extended abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Madison, USA, August 2024 (misc) Accepted
ei
Dmitriev, D., Szabó, K., Sanyal, A.
On the Growth of Mistakes in Differentially Private Online Learning: A Lower Bound Perspective
37th Annual Conference on Learning Theory (COLT), July 2024, (talk) (conference) Accepted
ei
Beck, J., Bosch, N., Deistler, M., Kadhim, K. L., Macke, J. H., Hennig, P., Berens, P.
Diffusion Tempering Improves Parameter Estimation with Probabilistic Integrators for ODEs
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
ei
Chen*, W., Zhang*, M., Paige, B., Hernández-Lobato, J. M., Barber, D.
Diffusive Gibbs Sampling
41st Conference on Machine Learning (ICML), July 2024, *equal contribution (conference) Accepted
ei
Schröder, C., Macke, J. H.
Simultaneous identification of models and parameters of scientific simulators
41st Conference on Machine Learning (ICML), Vienna, Austria, July 2024 (conference) Accepted
ei
Bouchiat, K., Immer, A., Yèche, H., Rätsch, G., Fortuin, V.
Improving Neural Additive Models with Bayesian Principles
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
ei
Xu, D., Yao, D., Lachapelle, S., Taslakian, P., von Kügelgen, J., Locatello, F., Magliacane, S.
A Sparsity Principle for Partially Observable Causal Representation Learning
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
ei
Kremer, H., Schölkopf, B.
Geometry-Aware Instrumental Variable Regression
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
hi
L’Orsa, R., Bisht, A., Yu, L., Murari, K., Westwick, D. T., Sutherland, G. R., Kuchenbecker, K. J.
Reflectance Outperforms Force and Position in Model-Free Needle Puncture Detection
In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, USA, July 2024 (inproceedings) Accepted
ei
Hu, Y., Sanyal, A., Schölkopf, B.
Provable Privacy with Non-Private Pre-Processing
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
ei
Opedal, A., Stolfo, A., Shirakami, H., Jiao, Y., Cotterell, R., Schölkopf, B., Saparov, A., Sachan, M.
Do Language Models Exhibit the Same Cognitive Biases in Problem Solving as Human Learners?
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
ei
Gloeckler, M., Deistler, M., Weilbach, C. D., Wood, F., Macke, J. H.
All-in-one simulation-based inference
41st Conference on Machine Learning (ICML), July 2024 (conference) Accepted
hml
ei
Ben-Dov*, O., Fawkes*, J., Samadi, S., Sanyal, A.
The Role of Learning Algorithms in Collective Action
41st Conference on Machine Learning (ICML), July 2024, *equal contribution (conference) Accepted

ps
Fan, Z., Parelli, M., Kadoglou, M. E., Kocabas, M., Chen, X., Black, M. J., Hilliges, O.
HOLD: Category-agnostic 3D Reconstruction of Interacting Hands and Objects from Video
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)

ps
Liu, H., Zhu, Z., Becherini, G., Peng, Y., Su, M., Zhou, Y., Zhe, X., Iwamoto, N., Zheng, B., Black, M. J.
EMAGE: Towards Unified Holistic Co-Speech Gesture Generation via Expressive Masked Audio Gesture Modeling
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
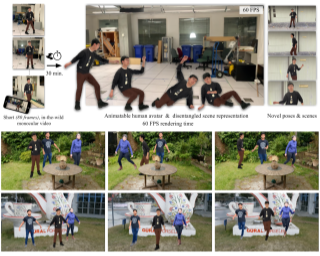
Kocabas, M., Chang, R., Gabriel, J., Tuzel, O., Ranjan, A.
HUGS: Human Gaussian Splats
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
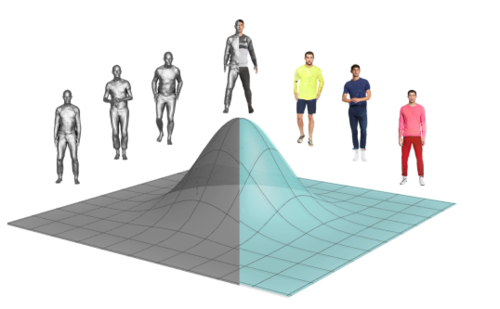
Sanyal, S., Ghosh, P., Yang, J., Black, M. J., Thies, J., Bolkart, T.
SCULPT: Shape-Conditioned Unpaired Learning of Pose-dependent Clothed and Textured Human Meshes
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ei
Gao, G., Liu, W., Chen, A., Geiger, A., Schölkopf, B.
GraphDreamer: Compositional 3D Scene Synthesis from Scene Graphs
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2024 (conference) Accepted
ps
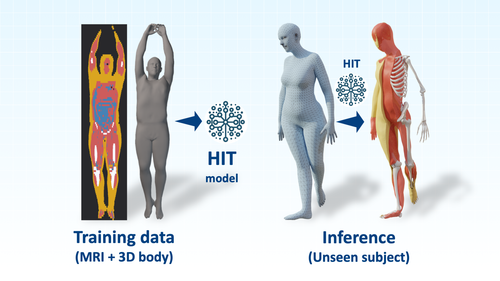
Keller, M., Arora, V., Dakri, A., Chandhok, S., Machann, J., Fritsche, A., Black, M. J., Pujades, S.
HIT: Estimating Internal Human Implicit Tissues from the Body Surface
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
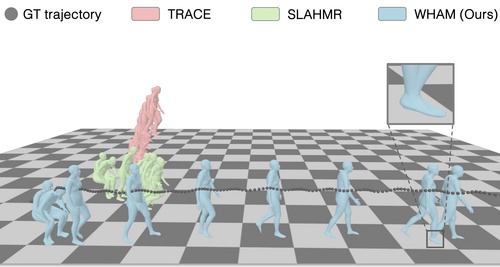
Shin, S., Kim, J., Halilaj, E., Black, M. J.
WHAM: Reconstructing World-grounded Humans with Accurate 3D Motion
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
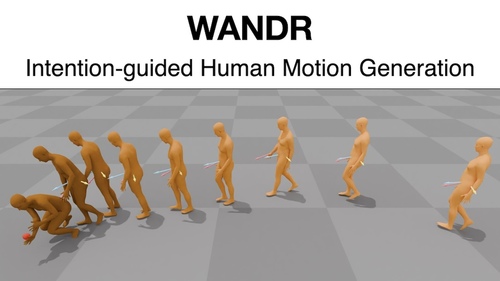
Diomataris, M., Athanasiou, N., Taheri, O., Wang, X., Hilliges, O., Black, M. J.
WANDR: Intention-guided Human Motion Generation
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
hvlg
ncs
ps
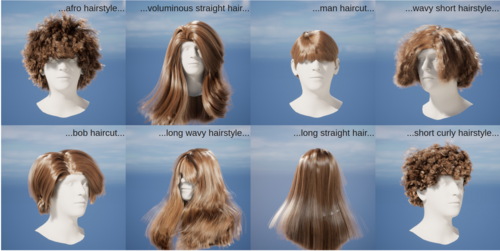
Sklyarova, V., Zakharov, E., Hilliges, O., Black, M. J., Thies, J.
Text-Conditioned Generative Model of 3D Strand-based Human Hairstyles
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
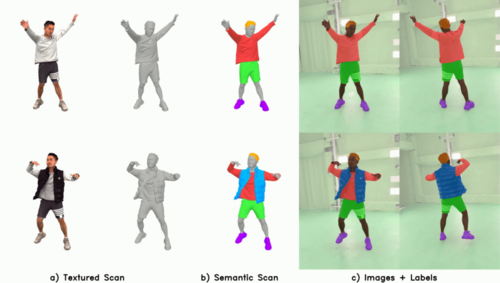
Wang, W., Ho, H., Guo, C., Rong, B., Grigorev, A., Song, J., Zarate, J. J., Hilliges, O.
4D-DRESS: A 4D Dataset of Real-World Human Clothing With Semantic Annotations
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
hi
rm
Sanchez-Tamayo, N., Yoder, Z., Ballardini, G., Rothemund, P., Keplinger, C., Kuchenbecker, K. J.
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Expressive and Salient Haptic Feedback
Hands-on demonstration presented at EuroHaptics, Lille, France, June 2024 (misc) Accepted

ps
Zuffi, S., Mellbin, Y., Li, C., Hoeschle, M., Kjellstrom, H., Polikovsky, S., Hernlund, E., Black, M. J.
VAREN: Very Accurate and Realistic Equine Network
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
hi
Matthew, V., Simancek, R. E., Telepo, E., Machesky, J., Willman, H., Ismail, A. B., Schulz, A. K.
Empowering Change: The Role of Student Changemakers in Advancing Sustainability within Engineering Education
Proceedings of the American Society of Engineering Education (ASEE), June 2024, Victoria Matthew and Andrew K. Schulz contributed equally to this publication. (issue) In press
ps
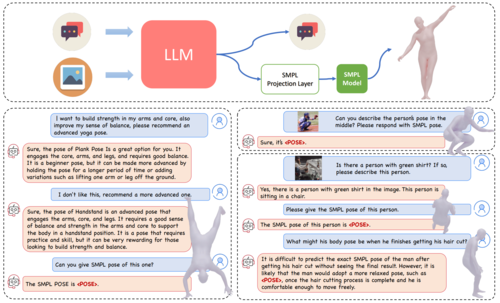
Feng, Y., Lin, J., Dwivedi, S. K., Sun, Y., Patel, P., Black, M. J.
ChatPose: Chatting about 3D Human Pose
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
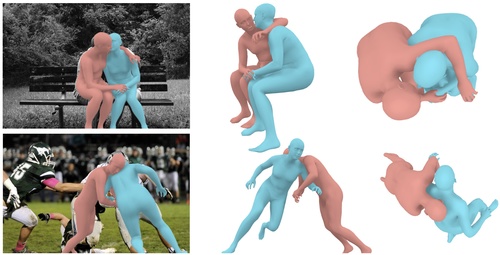
Müller, L., Ye, V., Pavlakos, G., Black, M., Kanazawa, A.
Generative Proxemics: A Prior for 3D Social Interaction from Images
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)

ps
Wu, K., Yang, L., Kuang, Z., Feng, Y., Han, X., Shen, Y., Fu, H., Zhou, K., Zheng, Y.
MonoHair: High-Fidelity Hair Modeling from a Monocular Video
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)

ps
Zheng, Y., Li, X., Nagano, K., Liu, S., Hilliges, O., Mello, S. D.
A Unified Approach for Text- and Image-guided 4D Scene Generation
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ps
Chhatre, K., Daněček, R., Athanasiou, N., Becherini, G., Peters, C., Black, M. J., Bolkart, T.
AMUSE: Emotional Speech-driven 3D Body Animation via Disentangled Latent Diffusion
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages: 1942-1953, June 2024 (inproceedings)
ps
Petrovich, M., Litany, O., Iqbal, U., Black, M. J., Varol, G., Peng, X. B., Rempe, D.
Multi-Track Timeline Control for Text-Driven 3D Human Motion Generation
In CVPR Workshop on Human Motion Generation, Seattle, CVPR 2024, June 2024 (inproceedings)

ps
Zhang, H., Zhang, Y., Hu, L., Zhang, J., Yi, H., Zhang, S., Liu, Y.
Real-time Monocular Full-body Capture in World Space via Sequential Proxy-to-Motion Learning
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)

ps
Retsinas, G., Filntisis, P. P., Danecek, R., Abrevaya, V. F., Roussos, A., Bolkart, T., Maragos, P.
SMIRK: 3D Facial Expressions through Analysis-by-Neural-Synthesis
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), CVPR 2024, June 2024 (inproceedings)
ei
Guo, S., Wildberger, J., Schölkopf, B.
Out-of-Variable Generalization for Discriminative Models
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024 (conference) Accepted
ei
Pace, A., Yèche, H., Schölkopf, B., Rätsch, G., Tennenholtz, G.
Delphic Offline Reinforcement Learning under Nonidentifiable Hidden Confounding
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024 (conference) Accepted
ei
Meterez*, A., Joudaki*, A., Orabona, F., Immer, A., Rätsch, G., Daneshmand, H.
Towards Training Without Depth Limits: Batch Normalization Without Gradient Explosion
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024, *equal contribution (conference) Accepted
hi
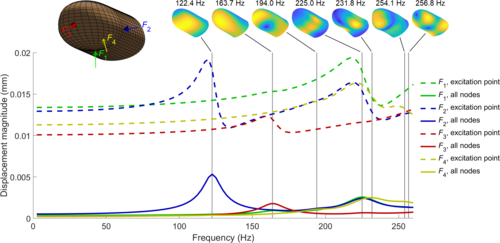
Serhat, G., Kuchenbecker, K. J.
Fingertip Dynamic Response Simulated Across Excitation Points and Frequencies
Biomechanics and Modeling in Mechanobiology, May 2024 (article)
hi
Rokhmanova, N., Martus, J., Faulkner, R., Fiene, J., Kuchenbecker, K. J.
GaitGuide: A Wearable Device for Vibrotactile Motion Guidance
Workshop paper (3 pages) presented at the ICRA Workshop on Advancing Wearable Devices and Applications Through Novel Design, Sensing, Actuation, and AI, Yokohama, Japan, May 2024 (misc)
ei
al
Spieler, A., Rahaman, N., Martius, G., Schölkopf, B., Levina, A.
The Expressive Leaky Memory Neuron: an Efficient and Expressive Phenomenological Neuron Model Can Solve Long-Horizon Tasks
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024 (conference) Accepted
ei
Open X-Embodiment Collaboration ( incl. Guist, S., Schneider, J., Schölkopf, B., Büchler, D. ).
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
IEEE International Conference on Robotics and Automation (ICRA), May 2024 (conference) Accepted
ei
Jin, Z., Liu, J., Lyu, Z., Poff, S., Sachan, M., Mihalcea, R., Diab*, M., Schölkopf*, B.
Can Large Language Models Infer Causation from Correlation?
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024, *equal supervision (conference) Accepted
ei
Donhauser, K., Lokna, J., Sanyal, A., Boedihardjo, M., Hönig, R., Yang, F.
Certified private data release for sparse Lipschitz functions
27th International Conference on Artificial Intelligence and Statistics (AISTATS), May 2024 (conference) Accepted
hi
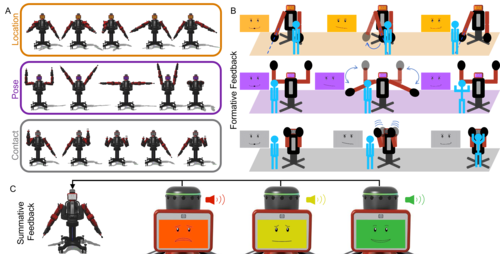
Mohan, M., Nunez, C. M., Kuchenbecker, K. J.
Closing the Loop in Minimally Supervised Human-Robot Interaction: Formative and Summative Feedback
Scientific Reports, 14(10564):1-18, May 2024 (article)
ei
Schneider, J., Schumacher, P., Guist, S., Chen, L., Häufle, D., Schölkopf, B., Büchler, D.
Identifying Policy Gradient Subspaces
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024 (conference) Accepted
al
Khajehabdollahi, S., Zeraati, R., Giannakakis, E., Schäfer, T. J., Martius, G., Levina, A.
Emergent mechanisms for long timescales depend on training curriculum and affect performance in memory tasks
In The Twelfth International Conference on Learning Representations, ICLR 2024, May 2024 (inproceedings)
ei
Khromov*, G., Singh*, S. P.
Some Intriguing Aspects about Lipschitz Continuity of Neural Networks
Proceedings of the Twelfth International Conference on Learning Representations (ICLR), May 2024, *equal contribution (conference) Accepted
ei
ps
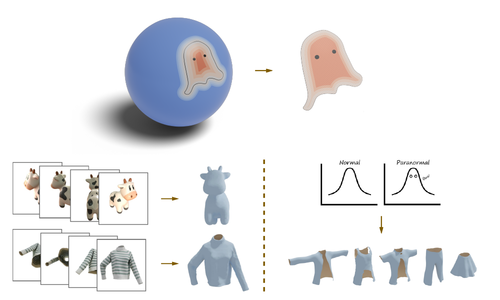
Liu, Z., Feng, Y., Xiu, Y., Liu, W., Paull, L., Black, M. J., Schölkopf, B.
Ghost on the Shell: An Expressive Representation of General 3D Shapes
In Proceedings of the Twelfth International Conference on Learning Representations, The Twelfth International Conference on Learning Representations, May 2024 (inproceedings) Accepted
ps
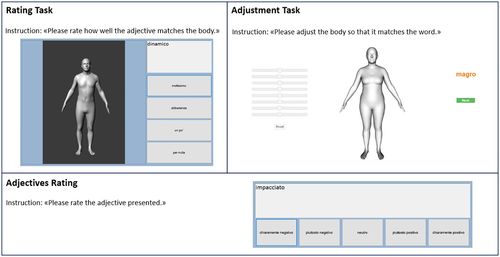
Meneguzzo, P., Behrens, S. C., Pavan, C., Toffanin, T., Quiros-Ramirez, M. A., Black, M. J., Giel, K., Tenconi, E., Favaro, A.
Exploring Weight Bias and Negative Self-Evaluation in Patients with Mood Disorders: Insights from the BodyTalk Project,
Frontiers in Psychiatry, 15, Sec. Psychopathology, May 2024 (article)