Wireless Acoustic-Surface Actuators for Miniaturized Endoscopes





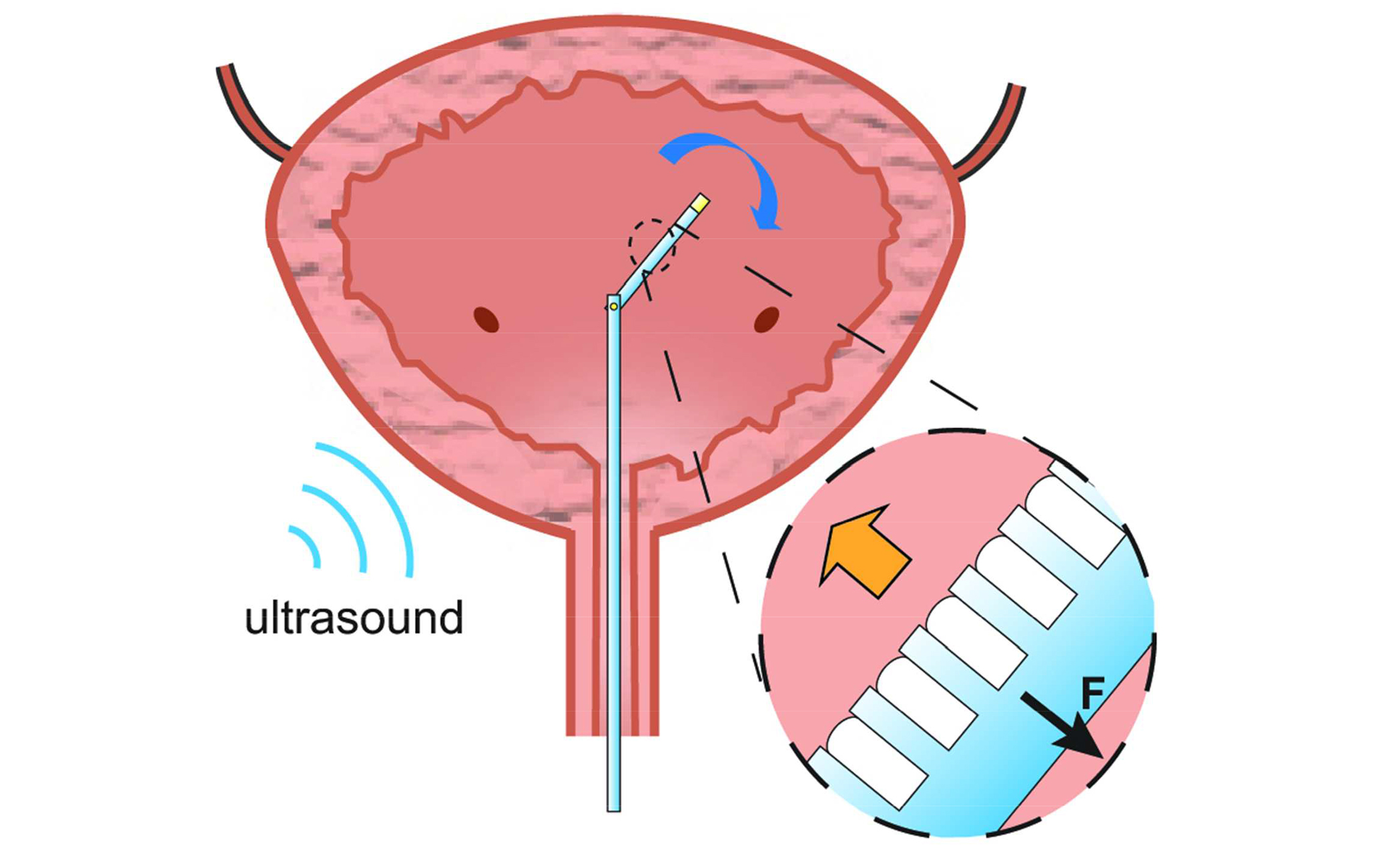
Endoscopy enables minimally invasive procedures in many medical fields, such as urology. However, current endoscopes are normally cable-driven, which limits their dexterity and makes them hard to miniaturize. Indeed current urological endoscopes have an outer diameter of about 3 mm and still only possess one bending degree of freedom. In this paper, we report a novel wireless actuation mechanism that increases the dexterity and that permits the miniaturization of a urological endoscope. The novel actuator consists of thin active surfaces that can be readily attached to any device and are wirelessly powered by ultrasound. The surfaces consist of two-dimensional arrays of micro-bubbles, which oscillate under ultrasound excitation and thereby generate an acoustic streaming force. Bubbles of different sizes are addressed by their unique resonance frequency, thus multiple degrees of freedom can readily be incorporated. Two active miniaturized devices (with a side length of around 1 mm) are demonstrated: a miniaturized mechanical arm that realizes two degrees of freedom, and a flexible endoscope prototype equipped with a camera at the tip. With the flexible endoscope, an active endoscopic examination is successfully performed in a rabbit bladder. This results show the potential medical applicability of surface actuators wirelessly powered by ultrasound penetrating through biological tissues.
| Author(s): | Qiu, Tian and Adams, Fabian and Palagi, Stefano and Melde, Kai and Mark, Andrew G and Wetterauer, Ulrich and Miernik, Arkadiusz and Fischer, Peer |
| Journal: | ACS Applied Materials & Interfaces |
| Volume: | 9 |
| Number (issue): | 49 |
| Pages: | 42536 - 42543 |
| Year: | 2017 |
| Month: | November |
| Day: | 17 |
| Project(s): | |
| Bibtex Type: | Article (article) |
| DOI: | 10.1021/acsami.7b12755 |
| State: | Published |
| URL: | http://dx.doi.org/10.1021/acsami.7b12755 |
| Electronic Archiving: | grant_archive |
| Eprint: | http://dx.doi.org/10.1021/acsami.7b12755 |
BibTex
@article{2017qiu2,
title = {Wireless Acoustic-Surface Actuators for Miniaturized Endoscopes},
journal = {ACS Applied Materials & Interfaces},
abstract = { Endoscopy enables minimally invasive procedures in many medical fields, such as urology. However, current endoscopes are normally cable-driven, which limits their dexterity and makes them hard to miniaturize. Indeed current urological endoscopes have an outer diameter of about 3 mm and still only possess one bending degree of freedom. In this paper, we report a novel wireless actuation mechanism that increases the dexterity and that permits the miniaturization of a urological endoscope. The novel actuator consists of thin active surfaces that can be readily attached to any device and are wirelessly powered by ultrasound. The surfaces consist of two-dimensional arrays of micro-bubbles, which oscillate under ultrasound excitation and thereby generate an acoustic streaming force. Bubbles of different sizes are addressed by their unique resonance frequency, thus multiple degrees of freedom can readily be incorporated. Two active miniaturized devices (with a side length of around 1 mm) are demonstrated: a miniaturized mechanical arm that realizes two degrees of freedom, and a flexible endoscope prototype equipped with a camera at the tip. With the flexible endoscope, an active endoscopic examination is successfully performed in a rabbit bladder. This results show the potential medical applicability of surface actuators wirelessly powered by ultrasound penetrating through biological tissues. },
volume = {9},
number = {49},
pages = {42536 - 42543},
month = nov,
year = {2017},
slug = {doi-10-1021-acsami-7b12755},
author = {Qiu, Tian and Adams, Fabian and Palagi, Stefano and Melde, Kai and Mark, Andrew G and Wetterauer, Ulrich and Miernik, Arkadiusz and Fischer, Peer},
eprint = { http://dx.doi.org/10.1021/acsami.7b12755 },
url = { http://dx.doi.org/10.1021/acsami.7b12755 },
month_numeric = {11}
}