Simulation-driven design to reduce pull-in voltage of donut HASEL actuators

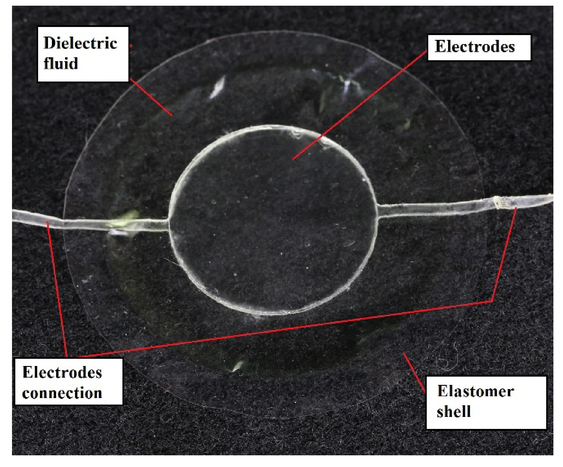
Soft robotics research has been motivated in part by the versatility and functionality of human muscle. Researchers have tried to mimic the speed and performance of human muscle by using soft fluid actuators; however, these actuators are often slow and bulky. Research conducted in the use of dielectric elastomers has proven to be promising. These dielectric elastomers can produce large strains using high voltage electrical input. However, the development of these dielectric elastomer actuators has been inhibited due to their susceptibility to dielectric breakdown and electrical aging. One recent technology that can solve these issues and advance the field of soft actuators, is that of the hydraulically amplified self-healing electrostatic (HASEL) actuator. Such actuators are comprised of a liquid dielectric enclosed in an elastomer shell with electrodes on either side of the shell. Incorporating a liquid dielectric dramatically reduces the impact of dielectric breakdown on the performance of HASEL actuators and allows for hydraulically-coupled modes of actuation. However, the voltages that are required to operate these actuators are still challenging for commercial applications. Our work uses a simulation-driven approach to determine design parameters for donut HASEL actuators that provide a high actuation strain at a reduced pull-in voltage. We outline a modeling approach that is comprised of calibrating the properties of a multiphysics finite element model using actual HASEL actuator experimental data. The model is validated using a donut-shape HASEL actuator from literature. The model is then applied to determine the optimal electrode size and fluid dielectric permittivity for achieving a low operating voltage. This simulation-driven design assists in the fabrication of soft actuators with potential application to a variety of industries. Keywords: Electroactive polymer, soft actuator, artificial muscles, simulation, finite element method, HASEL
| Author(s): | Shardul Panwar and Umesh Gandhi and Eric Acome and Christoph Keplinger and Michael Rowe |
| Journal: | Proceedings of SPIE |
| Volume: | 10966 |
| Pages: | 1096622 |
| Year: | 2019 |
| Month: | March |
| Day: | 13 |
| Publisher: | SPIE |
| Bibtex Type: | Article (article) |
| DOI: | 10.1117/12.2515388 |
| State: | Published |
| URL: | https://www.spiedigitallibrary.org/conference-proceedings-of-spie/10966/1096622/Simulation-driven-design-to-reduce-pull-in-voltage-of-donut/10.1117/12.2515388.pdf |
| Electronic Archiving: | grant_archive |
BibTex
@article{Keplinger19-EAPAD-Simulation,
title = {Simulation-driven design to reduce pull-in voltage of donut HASEL actuators},
journal = {Proceedings of SPIE},
abstract = {Soft robotics research has been motivated in part by the versatility and functionality of human muscle. Researchers have
tried to mimic the speed and performance of human muscle by using soft fluid actuators; however, these actuators are
often slow and bulky. Research conducted in the use of dielectric elastomers has proven to be promising. These
dielectric elastomers can produce large strains using high voltage electrical input. However, the development of these
dielectric elastomer actuators has been inhibited due to their susceptibility to dielectric breakdown and electrical aging.
One recent technology that can solve these issues and advance the field of soft actuators, is that of the hydraulically
amplified self-healing electrostatic (HASEL) actuator. Such actuators are comprised of a liquid dielectric enclosed in an
elastomer shell with electrodes on either side of the shell. Incorporating a liquid dielectric dramatically reduces the
impact of dielectric breakdown on the performance of HASEL actuators and allows for hydraulically-coupled modes of
actuation. However, the voltages that are required to operate these actuators are still challenging for commercial
applications.
Our work uses a simulation-driven approach to determine design parameters for donut HASEL actuators that provide a
high actuation strain at a reduced pull-in voltage. We outline a modeling approach that is comprised of calibrating the
properties of a multiphysics finite element model using actual HASEL actuator experimental data. The model is
validated using a donut-shape HASEL actuator from literature. The model is then applied to determine the optimal
electrode size and fluid dielectric permittivity for achieving a low operating voltage. This simulation-driven design
assists in the fabrication of soft actuators with potential application to a variety of industries.
Keywords: Electroactive polymer, soft actuator, artificial muscles, simulation, finite element method, HASEL},
volume = {10966},
pages = {1096622},
publisher = {SPIE},
month = mar,
year = {2019},
slug = {keplinger19-eapad-simulation},
author = {Panwar, Shardul and Gandhi, Umesh and Acome, Eric and Keplinger, Christoph and Rowe, Michael},
url = {https://www.spiedigitallibrary.org/conference-proceedings-of-spie/10966/1096622/Simulation-driven-design-to-reduce-pull-in-voltage-of-donut/10.1117/12.2515388.pdf},
month_numeric = {3}
}