Events & Talks
Haptic Intelligence
IS Colloquium
Prof. Dr. Jürgen Steimle
12-05-2025
Human-Computer Integration
The integration of computing with the human body is unlocking exciting opportunities for intelligent systems that enhance human capabilities. This talk will explore approaches to human-computer integration at the physical, sensory, and behavioral levels. First, seamless physical integration with the body requires a new generation of soft sensing and acting devices with unique form factors and material properties. I will present results from my research on multi-modal electronic skin. Second, I will discuss technologies for rich sensory integration using physiological sensors and feel-throug...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Dr. Maren Bennewitz
05-05-2025
Active Perception, Manipulation, and Personalized Navigation for Advanced Service Robots
Service robots acting in human environments must actively perceive their environment, act foresightedly, and adapt to individual user preferences. In this talk, I will first present methods to enable robots to efficiently perceive the environment and carefully manipulate objects in cluttered scenes. In particular, I will introduce an active mapping approach for confined spaces such as household shelves or horticultural crop rows, where significant occlusions pose challenges for service robots. In these scenarios, robots need to manipulate objects to reduce occlusions and improve visibility....
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Dr. Adam Spiers
26-03-2025
Dexterity and Haptics at the Manipulation and Touch Lab
The Manipulation and Touch Lab (MTL) at Imperial College London conducts research on topics related to human and robotic manipulation, tactile sensing, haptic interfaces and applied machine learning. In this talk the PI of the lab, Dr Ad Spiers, (formerly of MPI-IS) will discuss several of the MTL’s novel mechatronic approaches to these topics, focusing particularly on dexterous robotic manipulation and tactile sensors. Ad will also give an overview of his startup’s work on a novel haptic interface to aid navigation for vision-impaired pedestrians.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Dr. Hannah Stuart
18-03-2024
Designing Mobile Robots for Physical Interaction with Sandy Terrains
One day, robots will widely support exploration and development of unstructured natural environments. Much of the work I will present in this lecture is supported by NASA and is focused on robot design research relevant to accessing the surfaces of the Moon or Mars. Tensile elements appear repeatedly across the wide array of missions envisioned to support human or robotic exploration and habitation of the Moon. With a single secured tether either rovers or astronauts, or both, could belay down into steep lunar craters for the exploration of permanently shadowed regions; the tether prevents ...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Dangxiao Wang
07-07-2023
Wearable Haptics for Virtual Reality
Current virtual reality systems mainly rely on hand-held controllers, which can only provide six-dimensional motion tracking and vibrotactile feedback to users. One promising solution for improving immersion is to develop wearable systems that can capture over 20-DoF hand motion and provide distributed kinesthetic and tactile feedback to the skin. In this talk, I will discuss the technical challenges for developing high-fidelity wearable haptic systems, and then introduce our work on haptic gloves, hand-based haptic rendering algorithms, and the applications of wearable haptic systems in me...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Jun.-Prof. Dr. rer.nat. Maria Wirzberger
08-12-2022
Interdisciplinary Pathways to Responsible Human-Technology Partnership
How can we design technology in a way that optimally supports human demands in everyday life? And how can we mitigate system-generated biases to facilitate a trustworthy human-technology partnership? At the intersection of cognitive psychology, human-machine interaction, education, and artificial intelligence, my team and I apply a broad portfolio of experimental lab, field, and online studies, user-centered software development, and modeling and simulation techniques. Together with collaborators from academia, industry, and education, our ultimate goal is to design and evaluate responsible...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Nicolas Gerig
11-11-2022
Bio-inspired Robotics for Minimal-Invasive Surgery
At the BIROMED-Lab, we work on developing novel technology to advance robot-assisted medical interventions. I will provide a short overview on our current research challenges with a focus on robot-assisted, minimally-invasive surgery.
Minimal-invasive surgery results in faster patient recovery and using robotic tools allows to further enhance surgery outcome. Such robot-assisted minimal-invasive surgery is typically realized by replacing the direct manual guidance of instruments with telemanipulated or robot-guided instruments. For example, hand tremor can be filtered or the surgeons’ mo...
Nataliya Rokhmanova
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Dr. Annegret Mündermann
11-11-2022
Digital Biomarkers and Functional Biomechanics in Orthopaedics
Developments in assessing joint loading during locomotion and human movement are influenced by fast-pace technological advances. Simple technical solutions for capturing human movement using wearables and cloud-based solutions lead to applications in fields less related to biomechanics. Our group generates clinical evidence for using these technical solutions for assessing relevant parameters in large cohorts, collecting data outside of the laboratory and as digital biomarkers. Moreover, we investigate the functional biomechanics of orthopaedic conditions, evaluate established and novel tre...
Nataliya Rokhmanova
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Dr. Anna-Maria Liphardt
11-11-2022
Musculoskeletal Function in Immobilization and Rheumatic Disease
Immobilization and disease both affect musculoskeletal function. At the same time, functional parameters may be an indicator of disease activity in rheumatic disease and changes in the mechanical environment cause acute and long term adaptation of tissue morphology and function. This presentation will summarize effects of immobilization using bed rest or microgravity on cartilage metabolism as well es introduce experimental setups to assess musculoskeletal function in rheumatic disease.
Nataliya Rokhmanova
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. dr. J. B. J. (Jeroen) Smeets
18-08-2022
Grasping like Humans Do
Humans and robots frequently pick up objects. Neuroscientists try to understand how humans control the non-linear musculoskeletal system to do so, and roboticists try to design control to mimic human dexterity. Both groups of scientists tend to decompose grasping based on the characteristics of the hardware, which is clearly separated in a part for positioning the hand/gripper in space and a part for the actual griping. It is therefore generally assumed that mastering these two parts constitutes efficient control of the reach-to-grasp movement. I will argue that human motor control is not f...
Katherine J. Kuchenbecker
Ilona Jacobi

Haptic Intelligence
IS Colloquium
Wenzhen Yuan
09-11-2021
Simulating the GelSight Sensors: From Physics to Data
In recent years, vision-based high-resolution tactile sensors such as GelSight have been widely used because the rich signal provides useful information regarding the state of the robot and the environment. However, a major barrier for applying tactile sensors like GelSight is the cost. To make the tactile sensors more accessible to a broader community, we propose to build a simulation model for vision-based tactile sensors like GelSight. We explore two modeling methods for making the model: a physically-based method that uses rendering technologies to simulate the sensor's optical design a...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Dr. Katherine J. Kuchenbecker
13-12-2019
Haptic Intelligence (colloquium organized by the MPI for Biological Cybernetics)
Our scientific understanding of haptic interaction is still evolving, both because what you feel greatly depends on how you move, and because engineered sensors, actuators, and algorithms typically struggle to match human capabilities. Consequently, few computer and machine interfaces provide the human operator with high-fidelity touch feedback or carefully analyze the physical signals generated during haptic interactions, limiting their usability. The crucial role of the sense of touch is also deeply appreciated by researchers working to create autonomous robots that can competently manipu...

Haptic Intelligence
IS Colloquium
Seungmoon Choi, Ph.D.
06-12-2019
Automatic Authoring of Haptic Content
Providing rich and immersive physical experiences to users has become an essential component in many computer-interactive applications, where haptics plays a central role. However, as with other sensory modalities, modeling and rendering good haptic experiences with plausible physicality is a very demanding task in terms of the cost associated with modeling and authoring, not to mention the cost for development. No general and widely-used solutions exist yet for that; most designers and developers rely on their in-house programs, or even worse, manual coding. This talk will introduce the re...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Jean-Louis Thonnard
25-09-2019
From Fingertip Skin Mechanics to Dexterous Object Manipulation
Fingertip skin friction plays a critical role during object manipulation. We will describe a simple and reliable method to estimate the fingertip static coefficient of friction (CF) continuously and quickly during object manipulation, and we will describe a global expression of the CF as a function of the normal force and fingertip moisture. Then we will show how skin hydration modifies the skin deformation dynamics during grip-like contacts. Certain motor behaviours observed during object manipulation could be explained by the effects of skin hydration. Then the biomechanics of the partial...
Katherine J. Kuchenbecker
David Gueorguiev

Haptic Intelligence
IS Colloquium
Ernest (Ted) Gomez, MD, MTR
11-09-2019
Haptic Intelligence in Surgical Learning - Lessons from Laparoscopy and Robotics
Surgery is a demanding activity that places a human life in the hands of others. However, innovations in minimally invasive surgery have physically separated surgeons' hands from their patients, creating the need for surgeons and their tools to develop both natural and artificial haptic intelligence. This lecture examines the essential role of haptic intelligence in skill development for laparoscopic and robotic surgery.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Zhaoping Li
03-09-2019
A New Framework to Understanding Biological Vision
Visual attention selects a tiny amount of information that can be deeply processed by the brain, and gaze shifts bring the selected visual object to fovea, the center of the visual field, for better visual decoding or recognition of the selected objects. Therefore, central and peripheral vision should differ qualitatively in visual decoding, rather than just quantitatively in visual acuity.
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Gunhyuk Park
09-08-2019
Illusive and Realistic Vibrotactile Feedback: 2D Phantom Sensation and Vibrotactile Dimensional Reduction
Many hapticians have designed and implemented haptic effects to various user interactions. For several decades, hapticians have proved that the haptic feedback can improve multiple facets of user experience including task performance, analyzing and utilizing user perception, and substituting other sensory modalities. Among them, this talk introduces two representative rendering methods to provide vibrotactile effects to users: 2D phantom sensation that makes a user perceive illusive tactile perception by using multiple real vibrotactile actuators and vibrotactile dimensional reduction that ...
Katherine J. Kuchenbecker
Haptic Intelligence
IS Colloquium
Dr Antonia Tzemanaki
03-06-2019
Anthropomorphism in Surgical Robotics and Wearable Technologies
Over the past century, abdominal surgery has seen a rapid transition from open procedures to less invasive methods such as laparoscopy and robot-assisted minimally invasive surgery (R-A MIS), as they involve reduced blood loss, postoperative morbidity and length of hospital stay. Furthermore, R-A MIS has offered refined accuracy and more ergonomic instruments for surgeons, further minimising trauma to the patient. However, training surgeons in MIS procedures is becoming increasingly long and arduous, while commercially available robotic systems adopt a design similar to conventional laparos...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Caroline G. L. Cao, Ph.D.
23-05-2019
Human Factors Research in Minimally Invasive Surgery
Health care is probably the last remaining unsafe critical system. A large proportion of reported medical errors occur in the hospital operating room (OR), a highly complex sociotechnical environment. As technology is being introduced into the OR faster than surgeons can learn to use them, surgical errors result from the unfamiliar instrumentation, increased motoric, perceptual and cognitive demands on the surgeons, as well as the lack of adequate training. Effective technology design for minimally invasive surgery requires an understanding of the system constraints of remote surgery, and t...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Veronica J. Santos
25-10-2018
Artificial Haptic Intelligence for Human-Machine Systems
The functionality of artificial manipulators could be enhanced by artificial “haptic intelligence” that enables the identification of object features via touch for semi-autonomous decision-making and/or display to a human operator. This could be especially useful when complementary sensory modalities, such as vision, are unavailable. I will highlight past and present work to enhance the functionality of artificial hands in human-machine systems. I will describe efforts to develop multimodal tactile sensor skins, and to teach robots how to haptically perceive salient geometric features such ...
Katherine J. Kuchenbecker
Adam Spiers

Haptic Intelligence
IS Colloquium
Veronica J. Santos
24-10-2018
Artificial Haptic Intelligence for Human-Machine Systems
The functionality of artificial manipulators could be enhanced by artificial “haptic intelligence” that enables the identification of object features via touch for semi-autonomous decision-making and/or display to a human operator. This could be especially useful when complementary sensory modalities, such as vision, are unavailable. I will highlight past and present work to enhance the functionality of artificial hands in human-machine systems. I will describe efforts to develop multimodal tactile sensor skins, and to teach robots how to haptically perceive salient geometric features such ...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Chris Macnab
23-10-2018
Control Systems for a Surgical Robot on the Space Station
As part of a proposed design for a surgical robot on the space station, my research group has been asked to look at controls that can provide literally surgical precision. Due to excessive time delay, we envision a system with a local model being controlled by a surgeon while the remote system on the space station follows along in a safe manner. Two of the major design considerations that come into play for the low-level feedback loops on the remote side are 1) the harmonic drives in a robot will cause excessive vibrations in a micro-gravity environment unless active damping strategies ar...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Peter Pott
04-10-2018
Medical Robots with a Haptic Touch – First Experiences with the FLEXMIN System
The FLEXMIN haptic robotic system is a single-port tele-manipulator for robotic surgery in the small pelvis. Using a transanal approach it allows bi-manual tasks such as grasping, monopolar cutting, and suturing with a footprint of Ø 160 x 240 mm³. Forces up to 5 N in all direction can be applied easily. In addition to provide low latency and highly dynamic control over its movements, high-fidelity haptic feedback was realised using built-in force sensors, lightweight and friction-optimized kinematics as well as dedicated parallel kinematics input devices. After a brief description of the s...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
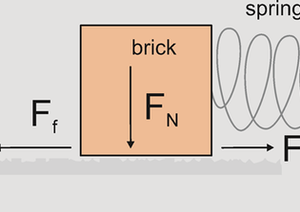
Prof. Dr. Cornelius Schwarz
02-07-2018
The Computational Skin. Tactile Perception based on Slip Movements.
Touch requires mechanical contact and is governed by the physics of friction. Frictional movements may convert the continuous 3D profile of textural objects into discrete and probabilistic movement events of the viscoelastic integument (skin/hair) called stick-slip movements (slips). This complex transformation may further be determined by the microanatomy and the active movements of the sensing organ. Thus, the integument may realize a computation, transforming the tactile world in a context dependent way - long before it even activates neurons. The possibility that the tactile world is pe...
Katherine J. Kuchenbecker
Haptic Intelligence
IS Colloquium
Yon Visell, PhD
20-06-2018
Haptic Engineering and Science at Multiple Scales
I will describe recent research in my lab on haptics and robotics. It has been a longstanding challenge to realize engineering systems that can match the amazing perceptual and motor feats of biological systems for touch, including the human hand. Some of the difficulties of meeting this objective can be traced to our limited understanding of the mechanics, and to the high dimensionality of the signals, and to the multiple length and time scales - physical regimes - involved. An additional source of richness and complication arises from the sensitive dependence of what we feel on what ...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Karon MacLean
28-05-2018
Making Haptics and its Design Accessible
Today’s advances in tactile sensing and wearable, IOT and context-aware computing are spurring new ideas about how to configure touch-centered interactions in terms of roles and utility, which in turn expose new technical and social design questions. But while haptic actuation, sensing and control are improving, incorporating them into a real-world design process is challenging and poses a major obstacle to adoption into everyday technology. Some classes of haptic devices, e.g., grounded force feedback, remain expensive and limited in range.
I’ll describe some recent highlights of an o...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Jan Peters
13-04-2018
Machine Learning for Tactile Manipulation
Today’s robots have motor abilities and sensors that exceed those of humans in many ways: They move more accurately and faster; their sensors see more and at a higher precision and in contrast to humans they can accurately measure even the smallest forces and torques. Robot hands with three, four, or five fingers are commercially available, and, so are advanced dexterous arms. Indeed, modern motion-planning methods have rendered grasp trajectory generation a largely solved problem. Still, no robot to date matches the manipulation skills of industrial assembly workers despite that manipulati...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
Prof. Christian Wallraven
13-02-2018
Vision and Haptics: a Cognitive and Computational Investigation About How We Perceive the World
Already starting at birth, humans integrate information from several sensory modalities in order to form a representation of the environment - such as when a baby explores, manipulates, and interacts with objects. The combination of visual and touch information is one of the most fundamental sensory integration processes, as touch information (such as body-relative size, shape, texture, material, temperature, and weight) can easily be linked to the visual image, thereby providing a grounding for later visual-only recognition. Previous research on such integration processes has so far mainly...
Katherine J. Kuchenbecker

Haptic Intelligence
IS Colloquium
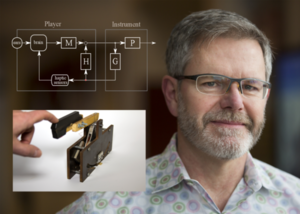
Professor Brent Gillespie
20-11-2017
Extending the Reafference and Internal Model Principles to Support Physical Human-Robot Interaction
Relative to most robots and other machines, the human body is soft, its actuators compliant, and its control quite forgiving. But having a body that bends under load seems like a bad set-up for motor dexterity: the brain is faced with controlling more rather than fewer degrees of freedom. Undeniably, though, the soft body approach leads to superior solutions. Robots are putzes by comparison! While de-putzifying robots (perhaps by making them softer) is an endeavor I will discuss to some degree, in this talk I will focus on the design of robots intended to work cooperatively with humans, usi...
Katherine J. Kuchenbecker